[논문리뷰] CM-EVS: Sparse Panoramic RGB-D-Pose Data for Complete Scene Coverage
링크: 논문 PDF로 바로 열기
메타데이터
저자: Jiale Liu, Jungang Li, Jieming Yu, et al.
1. Key Terms & Definitions (핵심 용어 및 정의)
- COVER (Coverage-Oriented Viewpoint curation with ERP Range-depth warping): 3D 자산으로부터 파노라마 데이터를 생성할 때, 장면 커버리지(Scene coverage)를 최대화하고 깊이 충돌(Depth conflict)을 최소화하는 비학습형(Training-free) 뷰포인트 선정 알고리즘입니다.
- CM-EVS (Coverage-curated Metric ERP View Set): COVER 알고리즘을 통해 큐레이팅된 파노라마 RGB-D-Pose 데이터셋으로, 1,275개의 실내외 장면을 포함하며 각 프레임의 데이터 출처와 선정 논리를 투명하게 기록합니다.
- ERP (Equirectangular Projection): 360도 전방위를 하나의 사각형 이미지로 투영하는 방식으로, 파노라마 모델 학습을 위한 표준화된 인터페이스를 제공합니다.
- Conflict-aware warping: 누적된 3D 포인트 클라우드를 새로운 뷰포인트의 ERP 이미지로 투영하여, 이미 관측된 영역과 새로 관측될 영역 간의 깊이 정보 차이를 계산해 중복 및 오류를 방지하는 핵심 기법입니다.
2. Motivation & Problem Statement (연구 배경 및 문제 정의)
본 논문은 기존 3D 자산 데이터셋들이 파노라마 모델 학습을 위한 효과적인 '관측 레이어(Observation layer)'를 정의하지 못하고 있다는 문제점을 지적합니다. 기존 데이터셋들은 dense한 궤적 기반의 중복 샘플링을 수행하거나, 출처별로 상이한 렌더링 정책을 사용하여 지리적 데이터의 비교 가능성과 일관성이 떨어집니다. 또한, 수작업이나 단순 휴리스틱 기반의 뷰 선정 방식은 장면의 중요 영역을 누락하거나 깊이 일관성이 결여된 관측치를 생성할 위험이 큽니다 [Figure 1]. 이러한 문제를 해결하기 위해 저자들은 3D 장면을 기하학적으로 완벽히 커버하면서도 중복을 최소화할 수 있는 reproducible하고 auditable한 파노라마 관측 데이터 생성 체계가 필요하다고 주장합니다.
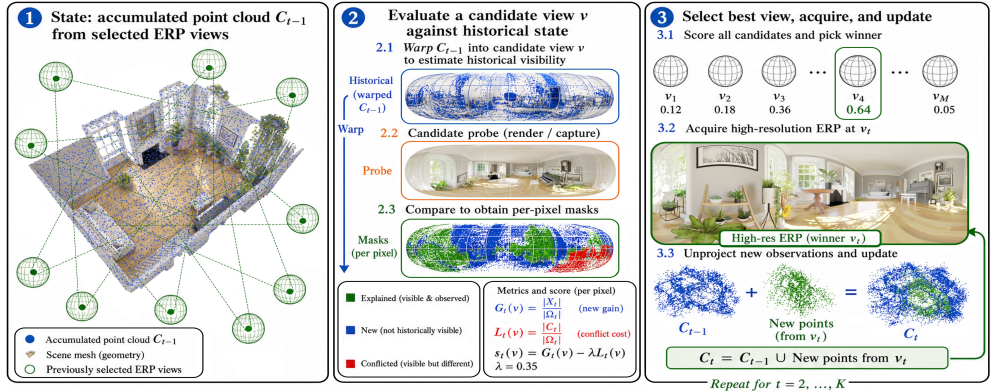
Figure 1 — CM-EVS 및 COVER 파이프라인 개요
3. Method & Key Results (제안 방법론 및 핵심 결과)
본 논문은 파노라마 뷰 선정을 conflict-aware coverage maximization 문제로 정식화한 COVER 프레임워크를 제안합니다 [Figure 2]. COVER는 greedy selection 전략을 사용하며, Warping oracle을 통해 이미 관측된 3D 포인트 클라우드와의 깊이 차이(Depth conflict)를 페널티로 부과하여 정보가 풍부한 새로운 뷰를 선택합니다. 저자들은 이 greedy 전략이 이론적으로 성능의 (1-1/e) 근사치를 보장함을 입증하였습니다. CM-EVS 데이터셋은 이 방식을 적용하여 평균 장면당 약 25개의 프레임만으로도 모든 13개 유형의 실내 공간을 포괄하는 sparse하고 컴팩트한 데이터 구성을 달성했습니다 [Table 1]. 비교 실험 결과, 기존의 random sampling이나 coverage-only baseline 대비 COVER는 커버리지-충돌 trade-off에서 압도적인 우위를 점하며, 특히 7배 적은 프레임으로도 기존 데이터셋과 대등하거나 더 높은 효율의 장면 커버리지를 구현했습니다.
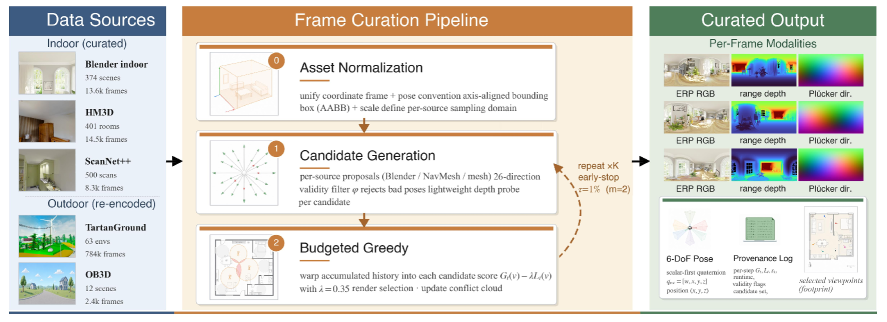
Figure 2 — COVER의 3단계 뷰 선정 파이프라인
4. Conclusion & Impact (결론 및 시사점)
본 연구는 파노라마 데이터 구축 과정에서의 뷰포인트 선정 방식을 명시적이고 기하학적으로 검증 가능한 영역으로 격상시켰다는 점에 큰 시사점이 있습니다. COVER와 CM-EVS는 3D 비전 모델 학습을 위한 observation layer를 표준화하여 향후 파노라마 NeRF, Gaussian Splatting, 3D 장면 생성 모델의 데이터 신뢰도를 높이는 데 기여할 것입니다. 본 연구의 결과는 향후 더 원칙적인(principled) 관측 데이터 설계가 3D 공간 지능 모델의 발전 방향임을 제시하며, 데이터 효율성과 재현성을 중시하는 학계 및 산업계 연구에 핵심적인 토대를 제공합니다.
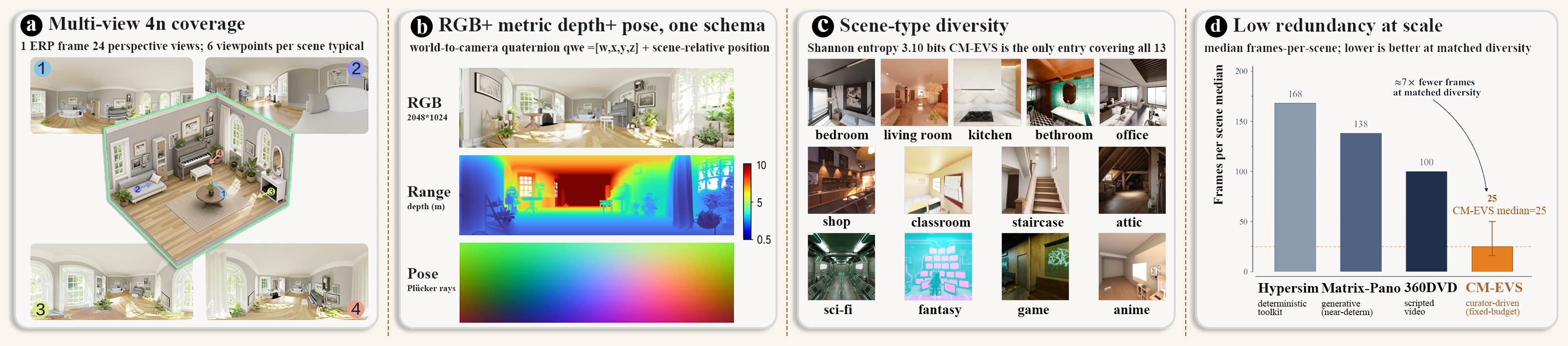
Figure 3 — CM-EVS의 핵심 속성 4가지
⚠️ 알림: 이 리뷰는 AI로 작성되었습니다.
관련 포스트
- [논문리뷰] Deform360: A Massive Multi-view Visuotactile Dataset for Deformable World Models
- [논문리뷰] JAMER: Project-Level Code Framework Dataset and Benchmark on Professional Game Engines
- [논문리뷰] Where, What, Why, and Importance: Structured Defect Grounding for Text-to-Image Feedback
- [논문리뷰] WildRelight: A Real-World Benchmark and Physics-Guided Adaptation for Single-Image Relighting
- [논문리뷰] FIT: A Large-Scale Dataset for Fit-Aware Virtual Try-On
Review 의 다른글
- 이전글 [논문리뷰] Agentic Discovery of Neural Architectures: AIRA-Compose and AIRA-Design
- 현재글 : [논문리뷰] CM-EVS: Sparse Panoramic RGB-D-Pose Data for Complete Scene Coverage
- 다음글 [논문리뷰] ChangeFlow -- Latent Rectified Flow for Change Detection in Remote Sensing
댓글