[논문리뷰] A Topology-Aware Spatiotemporal Handover Framework for Continuous Multi-UAV Tracking
링크: 논문 PDF로 바로 열기
메타데이터
저자: Jianlin Ye, Christos Kyrkou, Panayiotis Kolios
1. Key Terms & Definitions (핵심 용어 및 정의)
- MCMT (Multi-Camera Multi-Vehicle Tracking): 다수의 UAV가 관측하는 서로 다른 Field of View(FOV)에서 동일한 차량의 ID를 지속적으로 유지하며 추적하는 시스템을 의미합니다.
- Nadir-view Ambiguity: UAV가 지표면을 수직으로 내려다보는 각도(nadir-view)에서 촬영할 때, 차량의 지붕만 보여 시각적 정보가 제한되어 기존 Re-ID 방식으로는 차량 구분이 어려운 현상을 말합니다.
- Handover Success Rate (HOSR): 서로 다른 UAV의 중첩 영역(overlap zone)에서 차량의 ID가 끊기지 않고 정확하게 다음 UAV로 전달(handover)되는 성공률을 나타내는 성능 지표입니다.
- Spatiotemporal Queue: 차량의 이동 경로와 시간적 제약을 바탕으로 한 FIFO 큐 구조로, 시각적 정보 없이도 차량의 진입과 진출을 동기화하여 글로벌 ID를 보존하는 핵심 메커니즘입니다.
2. Motivation & Problem Statement (연구 배경 및 문제 정의)
본 연구는 다수 UAV 기반 교통 관제에서 발생하는 차량 ID 단절(trajectory fragmentation) 문제를 해결하기 위해 수행되었습니다 [Figure 1]. 기존 연구들은 개별 UAV를 독립적인 데이터 소스로 처리하여, 차량이 UAV의 FOV를 이동할 때마다 새로운 ID를 할당함으로써 전역적인 경로 분석을 불가능하게 만들었습니다. 특히 상업용 드론의 nadir-view 특성상 기존의 외형 기반 Re-Identification(Re-ID) 방식은 차량 간의 높은 유사성으로 인해 성능이 저하되는 한계가 있습니다 [Figure 2]. 따라서 본 논문은 복잡한 시각적 특징 추출 대신, 도로망의 물리적 제약과 흐름을 활용한 결정론적(deterministic) handover 메커니즘의 필요성을 제기합니다.
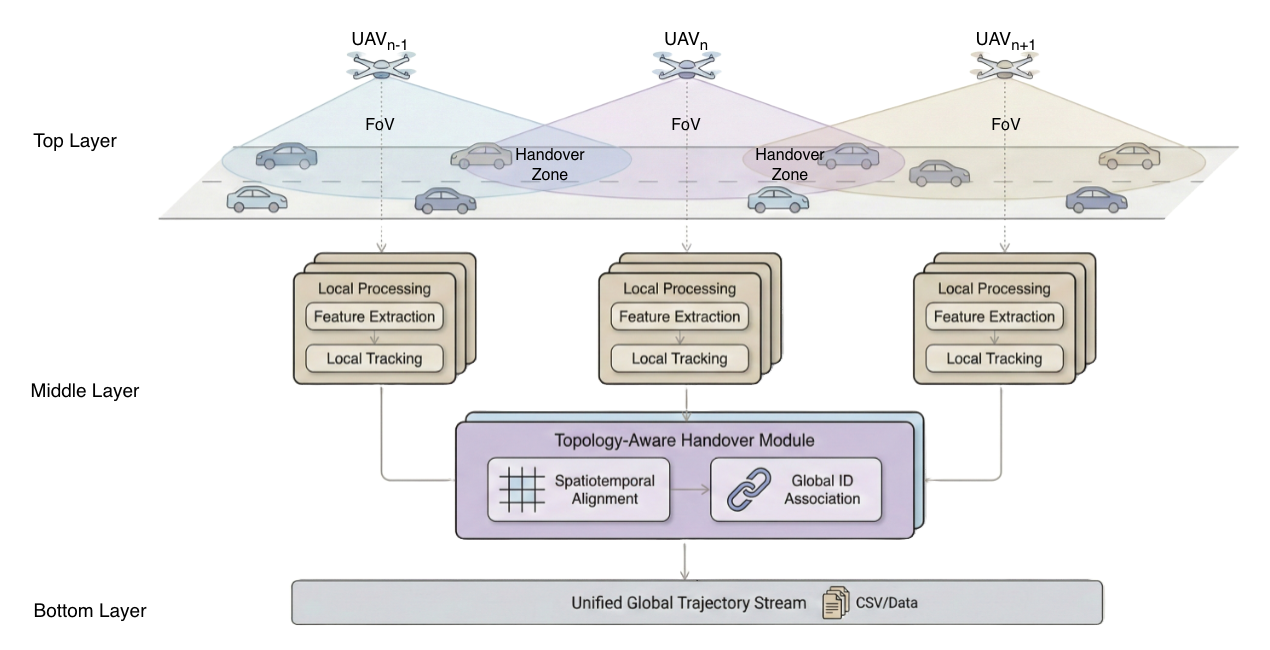
Figure 1 — 제안하는 통합 감시 프레임워크

Figure 2 — nadir-view 감시의 시각적 난제
3. Method & Key Results (제안 방법론 및 핵심 결과)
본 논문은 YOLO11 기반의 로컬 인식 엔진과 ByteTrack을 결합하고, 이를 Topology-Aware Handover 모듈과 연결하여 전역적 일관성을 유지하는 프레임워크를 제안합니다 [Figure 1]. 제안하는 방식은 도로의 기하학적 중첩 영역을 사전에 정의하고, 방향성 공간 분할(Directional Spatial Partitioning)을 통해 상반된 교통 흐름을 격리하여 handover의 정확도를 높입니다 [Figure 3]. 매칭 과정에서는 단순 시각적 특징이 아닌, 차량의 위치, 시간, 이동 방향 정보를 포함한 메타데이터를 기반으로 FIFO 큐를 관리합니다. 실험 결과, 제안하는 방식은 HOSR 99.8%를 기록하며 기존 FastReID의 74.1% 대비 압도적인 성능 우위를 증명했습니다 [Table I]. 또한, NVIDIA Jetson Orin NX 환경에서 YOLO11s 모델을 사용하여 25.6 FPS의 실시간 처리 능력을 확보함으로써 에지 디바이스에서의 배포 가능성을 입증했습니다 [Figure 5].
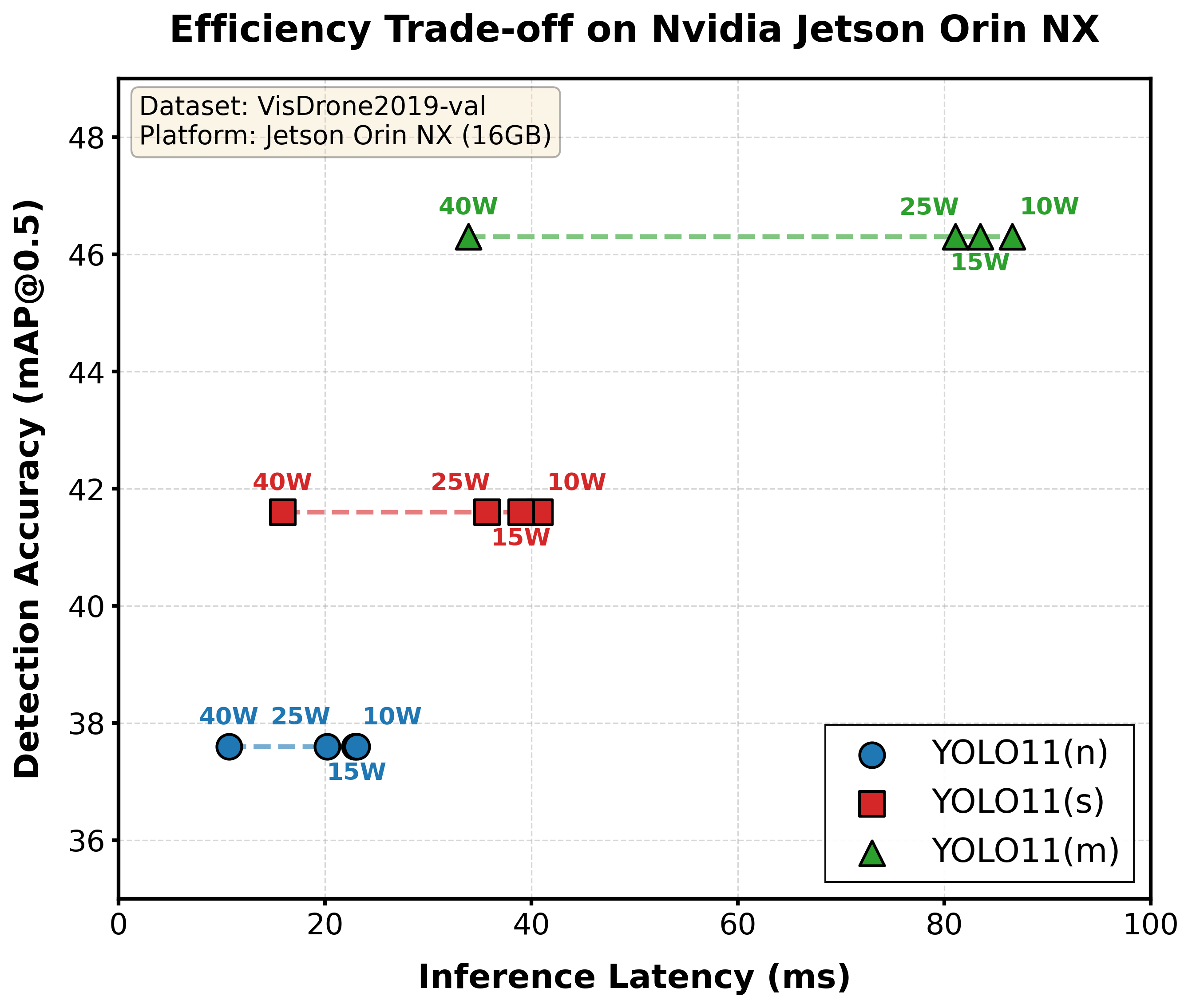
Figure 5 — 에지 환경 성능 및 효율 분석
4. Conclusion & Impact (결론 및 시사점)
본 논문은 외형 기반의 복잡한 연산 없이도 물리적 토폴로지 제약을 활용하여 UAV 군집 간의 차량 ID를 실시간으로 추적하는 Topology-Aware Spatiotemporal Handover 프레임워크를 제시합니다. 이 연구는 연산 자원이 제한된 에지 환경에서도 높은 정확도(99.8% HOSR)를 달성함으로써, 대규모 도시 수준의 교통 관리 체계 구축에 실질적인 해결책을 제공합니다. 향후 본 프레임워크는 드론 Swarm 기반의 완전 자율적 실시간 관제 시스템 연구에 있어 중요한 학술적·산업적 토대가 될 것으로 기대됩니다.
⚠️ 알림: 이 리뷰는 AI로 작성되었습니다.
관련 포스트
- [논문리뷰] LLMs4All: A Review on Large Language Models for Research and Applications in Academic Disciplines
- [논문리뷰] xHC: Expanded Hyper-Connections
- [논문리뷰] Xiaomi-Robotics-1: Scaling Vision-Language-Action Models with over 100K Hours of Real-World Trajectories
- [논문리뷰] When Does Muon Help Agentic Reinforcement Learning?
- [논문리뷰] VideoRAE: Taming Video Foundation Models for Generative Modeling via Representation Autoencoders
Review 의 다른글
- 이전글 [논문리뷰] minWM: A Full-Stack Open-Source Framework for Real-Time Interactive Video World Models
- 현재글 : [논문리뷰] A Topology-Aware Spatiotemporal Handover Framework for Continuous Multi-UAV Tracking
- 다음글 [논문리뷰] AnyMo: Scaling Any-Modality Conditional Motion Generation with Masked Modeling
댓글