[논문리뷰] NVIDIA OmniDreams: Real-Time Generative World Model for Closed-Loop Autonomous Vehicle Simulation
링크: 논문 PDF로 바로 열기
메타데이터
저자: NVIDIA, Aarti Basant, Amlan Kar, et al.
1. Key Terms & Definitions (핵심 용어 및 정의)
- OmniDreams: 실시간 자율주행 시뮬레이션을 위해 설계된 Action-conditioned generative world model foundation model.
- Closed-Loop Simulation: 주행 정책(Driving policy)이 환경과 실시간으로 상호작용하며 상태를 업데이트하고, 이에 따른 센서 데이터를 재생성하는 시뮬레이션 방식.
- World-Action Model (WAM): 생성형 모델의 잠재 표현(Latent representation)을 활용하여 정책 모델을 대체하거나 보조하는 주행 모델.
- Streaming KV Cache: 비디오 모델의 autoregressive 생성을 효율화하기 위해 과거 프레임의 연산 결과를 재사용하는 캐시 기법.
- Self Forcing: 학습 시 ground-truth 대신 모델이 생성한 출력을 context로 사용하여 exposure bias를 줄이는 distillation 프레임워크.
2. Motivation & Problem Statement (연구 배경 및 문제 정의)
본 논문은 기존의 Reconstruction-based 자율주행 시뮬레이터가 가진 제약 사항인 데이터 의존성과 새로운 장면(Novel scene)에 대한 일반화 부족 문제를 해결하기 위해 OmniDreams를 제안한다. 기존 방식은 캡처된 데이터 환경 내부에서만 가상 시나리오를 구성할 수 있어 확장성이 매우 제한적이다. 반면, OmniDreams는 대규모 비디오 데이터를 사전 학습하여 물리적인 환경의 변화를 이해하는 풍부한 visual prior를 갖춤으로써, 극한 기후나 예측 불가능한 보행자 행동 등 기존 시뮬레이터가 재현하기 어려운 long-tail 시나리오를 생성할 수 있다. 특히 [Figure 1]에서 볼 수 있듯이 주행 정책과 긴밀하게 연동된 closed-loop 상호작용을 통해 실시간성(Real-time)을 확보하는 것을 목표로 한다.
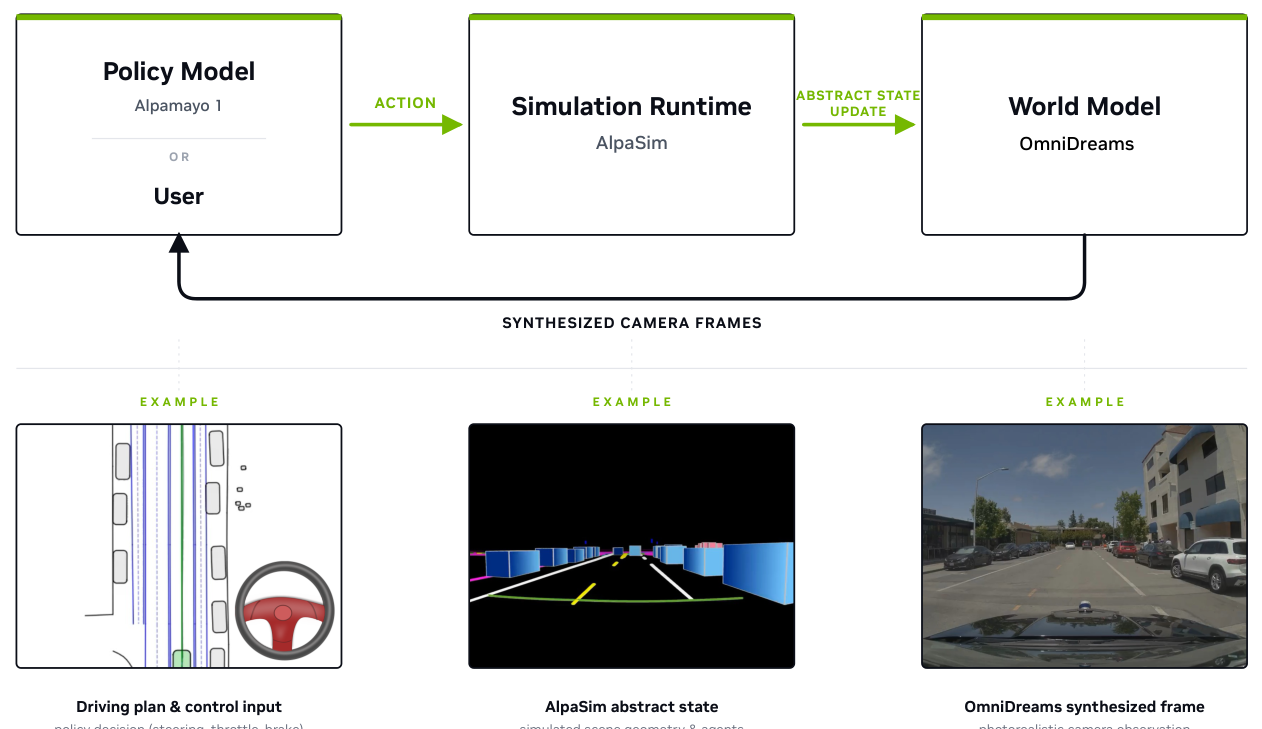
Figure 1 — 실시간 closed-loop 시뮬레이션의 전체 동작 워크플로우를 보여주는 핵심 다이어그램
3. Method & Key Results (제안 방법론 및 핵심 결과)
OmniDreams는 Cosmos-Predict 2.5 모델을 기반으로 mid- 및 post-training을 거쳐 개발되었으며, causal transformer backbone을 통해 autoregressive한 비디오 생성 기능을 제공한다. 특히 시뮬레이터의 abstract state(HD map, agent bounding boxes)와 text prompt를 입력받아 실시간으로 센서 데이터를 생성하며, [Figure 4]와 같이 Multi-view Cross Block을 도입하여 다중 카메라 시점 간의 일관성을 유지한다. Distillation 단계에서는 Self Forcing 기법을 사용하여 추론 속도를 극대화하고 long rollout에서의 artifact를 억제하였다. 실험 결과, OmniDreams 기반의 WAM은 10B 규모의 VLA 정책 모델인 Alpamayo 1.5 대비 매개변수가 5배 적음에도 불구하고, PAI 자율주행 데이터셋에서 Collision 비율을 6.9%에서 4.2%로 크게 감소시키는 우수한 성능을 보였다. 또한, [Figure 13]의 정량 지표에서 알 수 있듯이 Reconstruction 기반 시뮬레이터인 NuRec 대비 더 안정적인 시나리오 평가 결과를 제공하며, 주행 경로가 Ground Truth에서 벗어나는 경우에도 시각적 현실성을 지속적으로 유지하는 성능을 입증하였다.
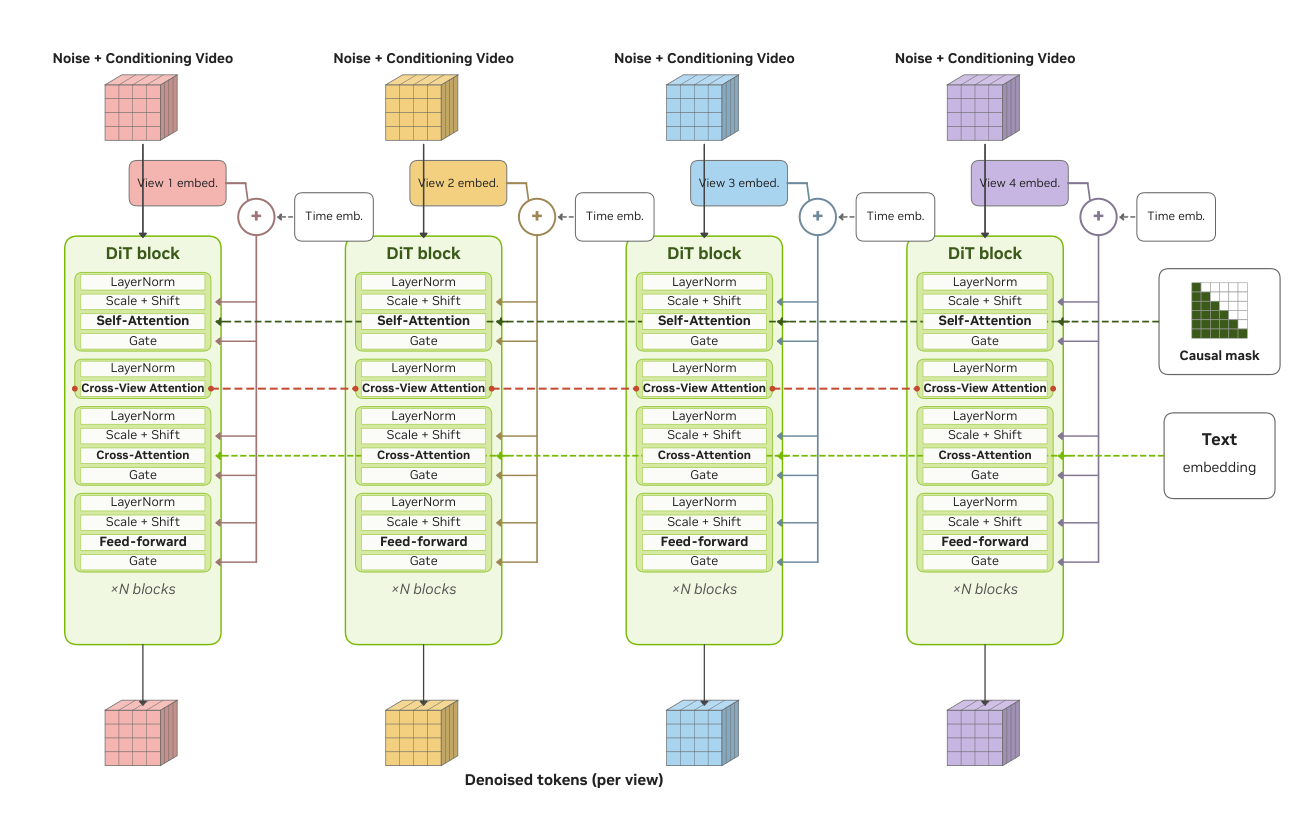
Figure 4 — 다중 카메라 시점 일관성을 유지하기 위한 DiT 구조와 cross-view attention 메커니즘을 설명하는 다이어그램
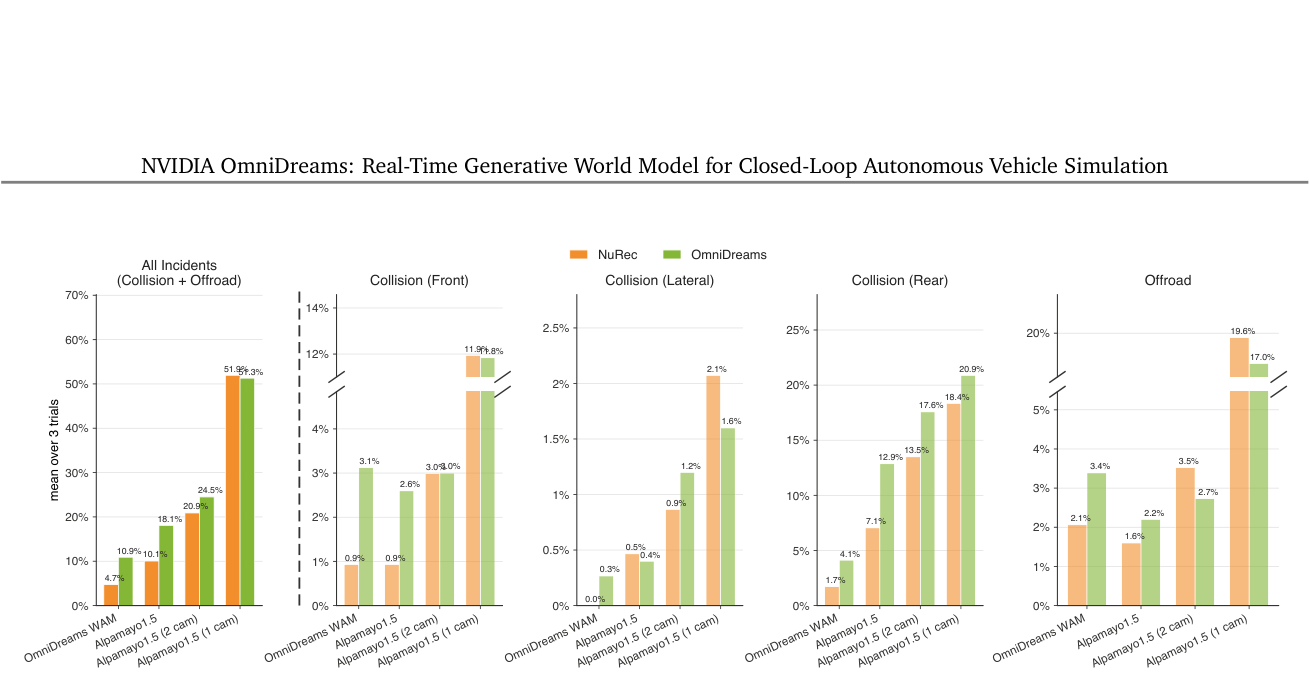
Figure 13 — NuRec과 OmniDreams 간의 시뮬레이션 품질 및 정책 성능을 비교한 핵심 실험 결과 그래프
4. Conclusion & Impact (결론 및 시사점)
본 논문은 재구성 기반 시뮬레이션의 한계를 극복하는 실시간 생성형 월드 모델인 OmniDreams를 통해 자율주행 정책 평가를 위한 새로운 패러다임을 제시한다. 이 연구는 생성형 모델이 단순히 환경을 렌더링하는 것을 넘어, 자율주행 정책의 공유 backbone으로 동작할 수 있음을 입증하였다. 향후 본 모델은 더욱 정교한 long-tail 시나리오 평가와 Vision-Language-Action 정책의 고도화에 기여하며, 안전한 자율주행 시스템 배포를 위한 시뮬레이션 표준으로 자리매김할 것으로 기대된다.
⚠️ 알림: 이 리뷰는 AI로 작성되었습니다.
관련 포스트
- [논문리뷰] LabVLA: Grounding Vision-Language-Action Models in Scientific Laboratories
- [논문리뷰] AHA-WAM:Asynchronous Horizon-Adaptive World-Action Modeling with Observation-Guided Context Routing
- [논문리뷰] AdaState: Self-Evolving Anchors for Streaming Video Generation
- [논문리뷰] Gamma-World: Generative Multi-Agent World Modeling Beyond Two Players
- [논문리뷰] LongLive-2.0: An NVFP4 Parallel Infrastructure for Long Video Generation
Review 의 다른글
- 이전글 [논문리뷰] Mitigating Perceptual Judgment Bias in Multimodal LLM-as-a-Judge via Perceptual Perturbation and Reward Modeling
- 현재글 : [논문리뷰] NVIDIA OmniDreams: Real-Time Generative World Model for Closed-Loop Autonomous Vehicle Simulation
- 다음글 [논문리뷰] OCC-RAG: Optimal Cognitive Core for Faithful Question Answering
댓글