[논문리뷰] SPIN: Structural LLM Planning via Iterative Navigation for Industrial Tasks
링크: 논문 PDF로 바로 열기
저자: Yusuke Ozaki, Dhaval Patel, et al.
1. Key Terms & Definitions (핵심 용어 및 정의)
- SPIN: Structural LLM Planning via Iterative Navigation의 약자로, 산업용 태스크를 위해 validated DAG 기반의 계획 수립과 접두사(prefix) 기반의 실행 제어를 결합한 플래닝 래퍼입니다.
- AssetOpsBench: 산업 자산 운영 및 유지보수를 위한 벤치마크로, 에이전트가 생성한 계획이 단순히 내부 추론 결과를 넘어 실제 실행 비용과 구조적 유효성에 직접적인 영향을 미치는 환경을 제공합니다.
- DAG (Directed Acyclic Graph): SPIN이 에이전트의 계획을 구조화하기 위해 사용하는 포맷으로, 각 노드는 태스크, 에이전트, 의존성(Dependency), 예상 출력 명세로 정의됩니다.
- Simulator-Critic Decomposition: 계획의 전체 실행 없이 접두사(prefix) 단계에서 시뮬레이터가 잠재적 결과를 예측하고, 크리틱이 조기 종료(early stopping) 여부를 판단하는 구조입니다.
2. Motivation & Problem Statement (연구 배경 및 문제 정의)
본 연구는 산업용 LLM 에이전트 시스템에서 발생하는 계획의 구조적 불일치와 비효율적인 실행 비용 문제를 해결하고자 합니다. 기존 LLM 플래너는 언어적 추론에는 능하지만, 실제 산업 현장에서 요구되는 구조적 유효성을 보장하지 못해 빈번한 실행 실패를 야기합니다. 특히, 계획 단계와 실행 단계가 분리되어 있어, 불필요하게 긴 워크플로우가 생성되거나 사소한 인덱스 오류가 전체 프로세스의 중단을 초래하는 한계가 있습니다. 이러한 환경에서 에이전트의 출력을 단순한 텍스트가 아닌, downstream 시스템에서 소비 가능한 Executable DAG Interface로 전환할 필요성이 대두되었습니다. [Figure 1]은 이러한 검증되지 않은 계획과 SPIN에 의해 재구성된 구조화된 계획의 차이를 명확히 보여줍니다.
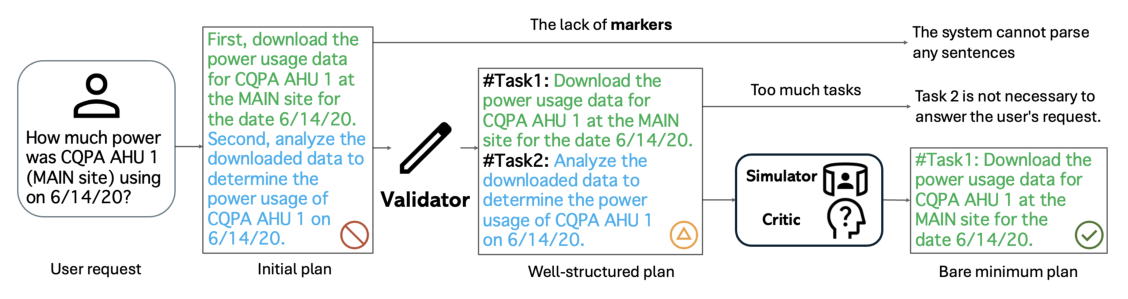
Figure 1 — SPIN 시스템의 검증 및 구조화 과정을 직관적으로 보여주는 핵심 다이어그램
3. Method & Key Results (제안 방법론 및 핵심 결과)
본 논문은 구조적 유효성을 보장하는 검증(Validation) 단계와 실행 비용을 최적화하는 시뮬레이터-크리틱 평가 루프를 제안합니다. [Figure 2]와 같이 SPIN은 _validate_plan_text를 통해 생성된 계획이 정의된 DAG 포맷(인덱스 연속성, 의존성 legality 등)을 준수하도록 강제하며, 문제가 있을 경우 에러 로그를 활용해 수정을 유도합니다. 실행 단계에서는 전체 플랜을 순차적으로 수행하는 대신, 접두사 기반 평가를 통해 현재까지의 결과만으로 충분하다고 판단될 경우 태스크를 즉시 종료합니다.
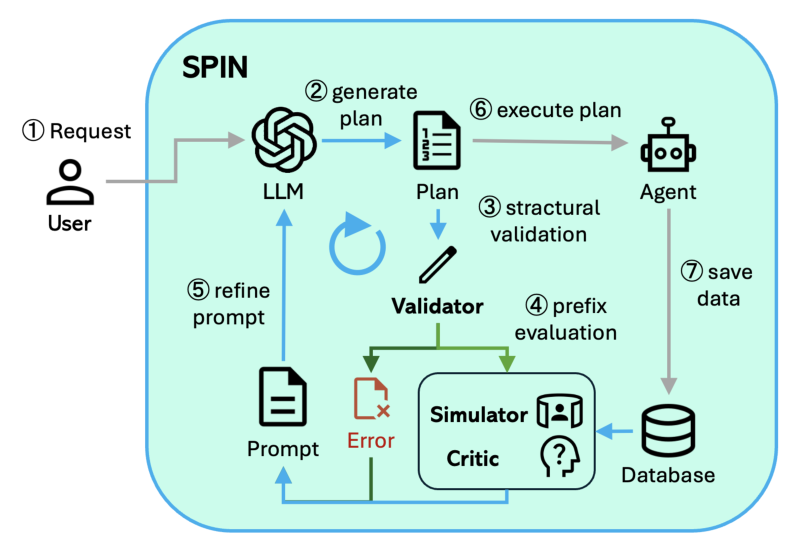
Figure 2 — SPIN의 전체 파이프라인과 Validator, Simulator-Critic 루프 구조를 설명하는 핵심 다이어그램
실험 결과, AssetOpsBench에서 [SPIN]은 [BASE] 대비 실행된 태스크 수를 1,061개에서 623개로 약 41% 감소시켰으며, 태스크 수준의 Accomplished 점수를 0.638에서 0.706으로 향상했습니다. [Table 3]에 따르면, 실행 시간(Elapsed(s)/Run) 또한 198.44초에서 143.53초로 단축되었고, 툴 호출(ToolCalls/Run) 빈도도 11.81에서 6.82로 크게 낮아졌습니다. 이는 SPIN이 더 많은 내부 토큰을 소비하더라도 외부 실행 비용을 효과적으로 절감하는 quality-effort trade-off에서 우위에 있음을 입증합니다. 또한, MCP Bench 평가에서도 GPT-OSS1과 Llama 4 Maverick 모델 모두에서 플래닝 및 grounding 관련 지표가 향상되었습니다.

Table 3 — SPIN 도입 전후의 실행 비용 및 효율성 수치 비교를 담은 주요 결과 데이터
4. Conclusion & Impact (결론 및 시사점)
본 연구는 산업용 에이전트 시스템에서 실행 구조의 명시성과 유효성이 계획의 정확성만큼 중요함을 성공적으로 입증했습니다. SPIN은 기존 LLM 에이전트의 구조적 취약성을 극복하고, 시뮬레이터 기반의 태스크 지식 전이와 조기 종료 메커니즘을 통해 실질적인 비용 절감을 실현했습니다. 이 연구는 향후 복잡한 산업 제어 시스템에서 안전하고 비용 효율적인 LLM 에이전트를 구축하는 데 중요한 프레임워크를 제공하며, 단순히 성능 향상을 넘어 execution-sensitive한 평가 체계의 표준을 제시한다는 점에서 큰 의의가 있습니다.
⚠️ 알림: 이 리뷰는 AI로 작성되었습니다.
관련 포스트
- [논문리뷰] Automating the Design of Embodied Agent Architectures
- [논문리뷰] When Classic Cache Policies Fail: Learning-Augmented Replacement for Semantic Retrieval Buffers
- [논문리뷰] Safety Testing LLM Agents at Scale: From Risk Discovery to Evidence-Grounded Verification
- [논문리뷰] Multi-Turn Agentic Scientific Literature Search via Workflow Induction
- [논문리뷰] Mastermind: Strategy-grounded Learning for Repository-Scale Vulnerability Reproduction
Review 의 다른글
- 이전글 [논문리뷰] SANA-WM: Efficient Minute-Scale World Modeling with Hybrid Linear Diffusion Transformer
- 현재글 : [논문리뷰] SPIN: Structural LLM Planning via Iterative Navigation for Industrial Tasks
- 다음글 [논문리뷰] STALE: Can LLM Agents Know When Their Memories Are No Longer Valid?
댓글