[논문리뷰] Learning POMDP World Models from Observations with Language-Model Priors
링크: 논문 PDF로 바로 열기
저자: Valentin Six, Frederik Panse, Mathis Fajeau, Lancelot Da Costa, Mridul Sharma, Alfonso Amayuelas, Tim Z. Xiao, David Hyland, Philipp Hennig, Bernhard Schölkopf
## 1. Key Terms & Definitions (핵심 용어 및 정의)
- POMDP: Partially Observable Markov Decision Process의 약자로, 시스템의 상태(State)를 직접 관측할 수 없는 상황에서 불확실성을 모델링하는 수학적 프레임워크입니다.
- Pinductor: LLM을 활용하여 관측-행동-보상 데이터로부터 실행 가능한 POMDP 월드 모델을 유도(Induce)하고 개선하는 제안된 프레임워크입니다.
- Particle Filtering: 잠재 상태(Latent State)에 대한 신뢰도(Belief)를 유지하고 업데이트하기 위해 샘플 입자(Particle) 집합을 사용하는 순차적 몬테카를로 기법입니다.
- REx (Refinement-by-Execution): 실행(Execution) 결과를 기반으로 모델 코드를 반복적으로 수정하고 구조화된 디버깅 피드백을 통해 모델 성능을 최적화하는 루프입니다.
## 2. Motivation & Problem Statement (연구 배경 및 문제 정의)
본 연구는 잠재 상태에 대한 정보(Ground-truth state)가 주어지지 않는 완전한 부분 관측 환경(Strict POMDP setting)에서 에이전트가 어떻게 효과적으로 세계 모델(World Model)을 학습할 수 있는지 탐구합니다. 기존의 많은 LLM 기반 월드 모델 학습 방법론들은 학습 과정에서 내부 상태값에 접근할 수 있는 특권적 정보(Privileged access)를 가정하는데, 이는 실제 로봇 공학이나 불완전 정보 게임 등 대다수 실제 환경에서 적용 불가능합니다. 저자들은 이러한 특권적 상태监督 없이도 LLM의 사전 지식을 활용해 샘플 효율적인 월드 모델을 학습할 수 있음을 증명하고자 합니다. 연구의 전체적인 아키텍처는 [Figure 1]을 통해 확인할 수 있습니다.
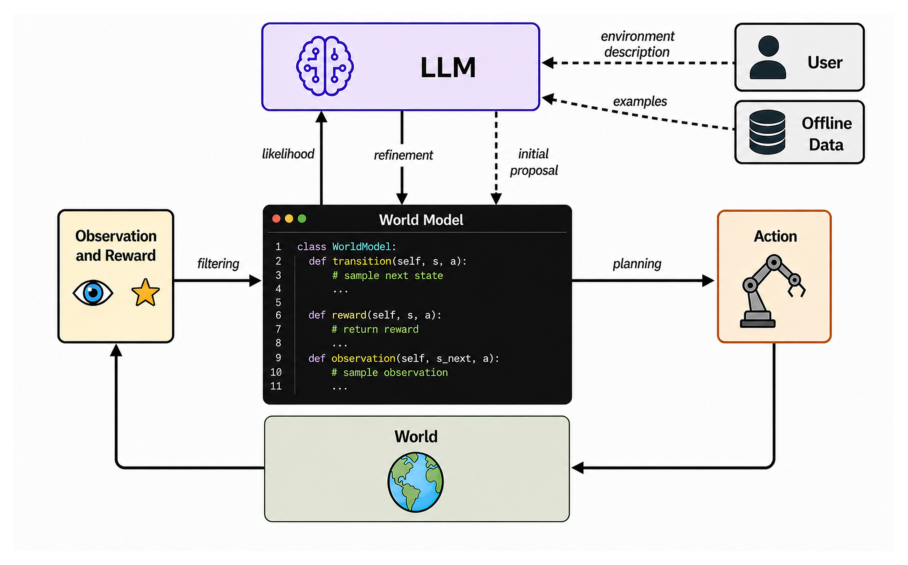
Figure 1 — 제안된 Pinductor의 전체적인 아키텍처 및 데이터 흐름을 시각화한 핵심 다이어그램
## 3. Method & Key Results (제안 방법론 및 핵심 결과)
본 논문은 LLM을 통해 POMDP 구성 요소(전이, 관측, 보상 모델)를 코드 형태로 제안하고, 이를 관측 데이터에 기반한 신뢰도(Belief) 기반의 우도(Likelihood) 점수를 통해 반복적으로 개선하는 [Figure 2]의 파이프라인을 제안합니다. 특히, 결정론적인 코드 모델의 출력을 거리 커널(Distance kernel)을 통해 소프트 우도로 변환함으로써, ground-truth 상태 접근 없이도 실시간 관측 데이터와 일관성을 유지하며 모델을 평가할 수 있게 설계되었습니다. 성능 평가 결과, Pinductor는 특권적 상태 접근이 가능한 기존 LLM 기반 베이스라인(POMDP Coder)과 비교하여 유사한 수준의 보상과 샘플 효율성을 달성했습니다. 또한, 단순한 tabular POMDP 베이스라인을 압도하는 성능을 보였으며, [Figure 3]에서 입증된 바와 같이 5가지의 다양한 MiniGrid 작업 전반에서 강건한 결과를 나타냅니다. LLM 모델 규모가 커질수록(예: Claude Opus 4.7, Qwen3.6 Plus) 성능이 비약적으로 향상되는 임계치 기반의 확장성(Threshold-like scaling)을 확인하였습니다.
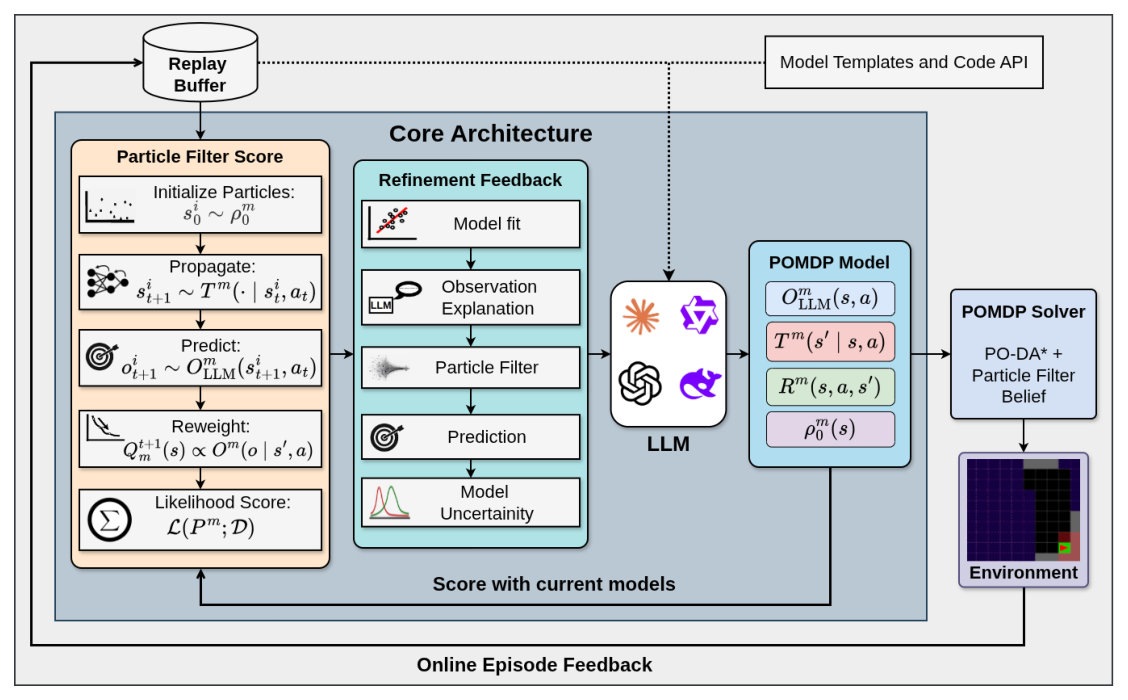
Figure 2 — 모델 제안, 필터링, 피드백 루프를 포함한 상세 방법론 파이프라인 설명
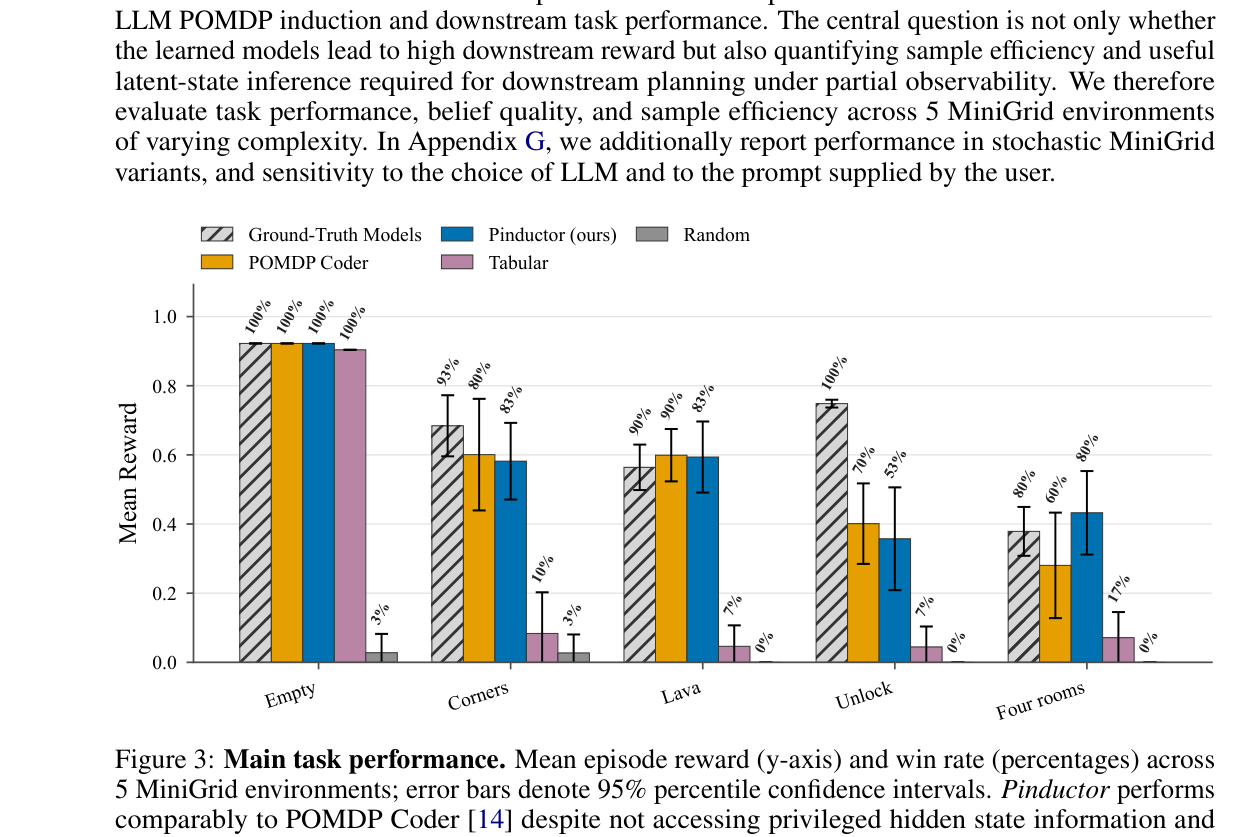
Figure 3 — 다양한 MiniGrid 환경에서의 평균 보상 및 성능 비교를 통한 핵심 정량적 결과 제시
## 4. Conclusion & Impact (결론 및 시사점) 본 논문은 LLM 사전 지식이 부분 관측 환경에서 특권적 상태监督를 대체할 수 있는 강력한 도구임을 입증했습니다. 제안된 Pinductor는 잠재 상태에 대한 직접적인 지도 없이도 실행 가능한 모델을 유도함으로써, 복잡한 현실 세계 환경으로의 일반화 가능성을 넓혔습니다. 이 연구는 월드 모델 학습의 실용성을 제고하고, 프로그래밍 가능한 지식과 관측 기반의 피드백 루프를 결합하여 데이터 효율성을 극대화하는 새로운 연구 방향을 제시합니다. 향후 연구는 LLM API 호출로 발생하는 높은 분산(Variance) 문제를 완화하고, 더 다양한 도메인으로의 전이 학습 능력을 평가하는 방향으로 나아갈 것으로 기대됩니다.
⚠️ 알림: 이 리뷰는 AI로 작성되었습니다.
관련 포스트
- [논문리뷰] World Models for Policy Refinement in StarCraft II
- [논문리뷰] Repetition over Diversity: High-Signal Data Filtering for Sample-Efficient German Language Modeling
- [논문리뷰] Learn2Fold: Structured Origami Generation with World Model Planning
- [논문리뷰] Bootstrapping Exploration with Group-Level Natural Language Feedback in Reinforcement Learning
- [논문리뷰] Heterogeneous Agent Collaborative Reinforcement Learning
Review 의 다른글
- 이전글 [논문리뷰] InsightTok: Improving Text and Face Fidelity in Discrete Tokenization for Autoregressive Image Generation
- 현재글 : [논문리뷰] Learning POMDP World Models from Observations with Language-Model Priors
- 다음글 [논문리뷰] Learning from Failures: Correction-Oriented Policy Optimization with Verifiable Rewards
댓글