[논문리뷰] PhysX-Omni: Unified Simulation-Ready Physical 3D Generation for Rigid, Deformable, and Articulated Objects
링크: 논문 PDF로 바로 열기
저자: Ziang Cao, Yinghao Liu, Haitian Li, Runmao Yao, Fangzhou Hong, Zhaoxi Chen, Liang Pan, Ziwei Liu
## 1. Key Terms & Definitions (핵심 용어 및 정의)
- PhysX-Omni: Rigid, deformable, articulated object를 아우르는 통합 시뮬레이션용 3D 생성 프레임워크입니다.
- PhysXVerse: 시뮬레이션에 즉시 활용 가능한(simulation-ready) 고품질 물리적 3D 데이터셋으로, 8K 이상의 자산과 2K 이상의 카테고리를 포함합니다.
- PhysX-Bench: 6가지 핵심 속성(geometry, absolute scale, material, affordance, kinematics, description)을 기반으로 생성된 3D 자산의 성능을 다각도로 평가하는 벤치마크입니다.
- Template-based RLE: 3D 구조의 공간적 중복성을 활용하여 고해상도 지오메트리를 텍스트 토큰 형태로 효율적으로 인코딩하는 기법입니다.
## 2. Motivation & Problem Statement (연구 배경 및 문제 정의) 기존의 3D 생성 연구들은 주로 시각적인 사실성(photorealism)에만 집중하여 물리 기반 시뮬레이션이나 실제 로봇 제어 환경에서 요구되는 물리적 속성을 결여하고 있습니다. 또한, 기존 방법론들은 rigid, deformable, articulated 등 특정 객체 유형에 국한되어 있어 범용적인 활용이 어렵습니다 [Figure 1]. 더욱이, 현실적인 시뮬레이션 환경에서 생성된 자산의 물리적 정확성을 검증할 수 있는 표준화된 벤치마크의 부재가 기술 발전을 저해하고 있습니다. 본 논문은 이러한 한계를 극복하기 위해 다목적 물리적 3D 생성의 통합 프레임워크인 PhysX-Omni를 제안합니다.
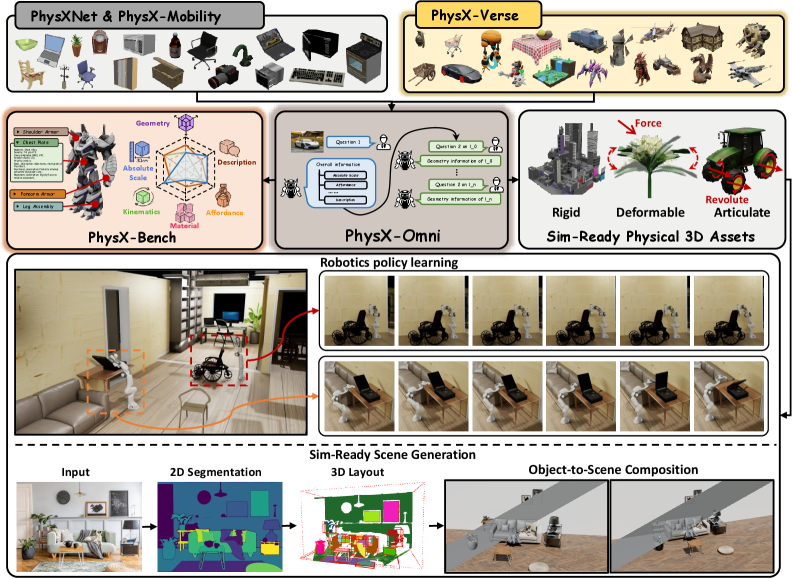
Figure 1 — PhysX-Omni 개요
## 3. Method & Key Results (제안 방법론 및 핵심 결과) 본 연구는 VLM(Vision-Language Model) 기반의 Coarse-to-Fine 생성 패러다임을 채택하여, 입력 이미지로부터 객체의 글로벌 정보와 파트 수준의 상세 지오메트리를 순차적으로 추론합니다 [Figure 2]. 핵심 방법론인 Template-based RLE는 3D 구조를 z-axis로 슬라이스하고, 공통 구조를 템플릿 레이어로 정의하여 데이터 압축 효율을 극대화하면서도 고해상도 구조 정보를 명시적으로 유지합니다 [Figure 3]. 실험 결과, PhysX-Omni는 PhysXVerse 데이터셋에서 이전 SOTA 모델 대비 지오메트리 품질과 물리적 속성 추론에서 압도적인 우위를 점했습니다. 정량적으로는 기존 대비 Chamfer Distance(CD)를 크게 단축시켰으며, Kinematic score는 0.9185로 타 모델(예: PhysX-Anything 0.4191) 대비 월등한 성능을 보였습니다 [Table 1]. 또한, PhysX-Bench 평가에서도 대다수의 물리적 지표에서 최고 성능을 달성하여 일반화 능력을 입증했습니다 [Table 2]. 특히, 생성된 자산을 시뮬레이터에 직접 배치하여 복잡한 로봇 제어 및 조작 태스크를 성공적으로 수행함으로써 Sim-ready 자산으로서의 실용성을 증명했습니다.
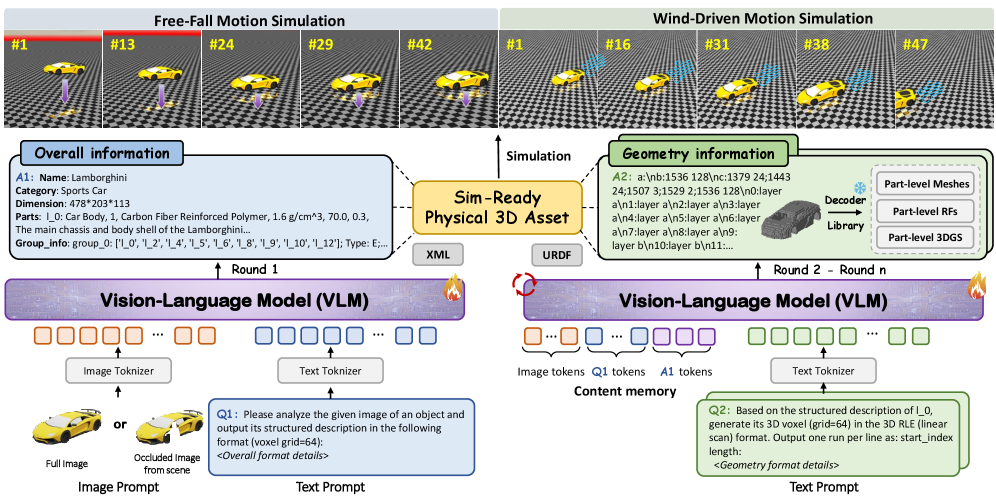
Figure 2 — 생성 패러다임
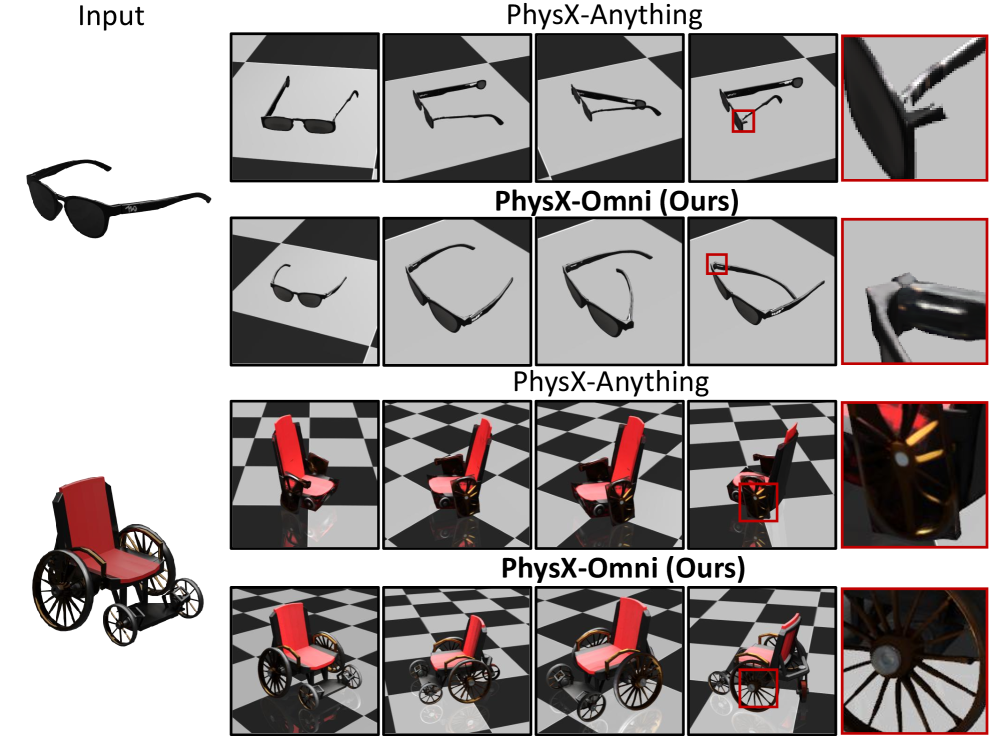
Figure 3 — 지오메트리 표현 방식
## 4. Conclusion & Impact (결론 및 시사점) 본 논문은 다양한 물리적 속성을 갖춘 시뮬레이션용 3D 자산 생성을 위한 통합 프레임워크인 PhysX-Omni를 구축하고, 대규모 데이터셋과 포괄적인 벤치마크를 제공합니다. 제안된 프레임워크는 명시적인 지오메트리 표현 방식을 통해 복잡한 토폴로지의 객체 생성에서도 높은 안정성을 확보했습니다. 이 연구는 로봇 공학 및 Embodied AI 분야에서 3D 시뮬레이션 환경을 구축하는 비용을 획기적으로 낮추고, 가상과 실제를 잇는 물리적 AI 발전에 중대한 기여를 할 것으로 기대됩니다.
⚠️ 알림: 이 리뷰는 AI로 작성되었습니다.
관련 포스트
- [논문리뷰] Hallo4D: Multi-Modal Hallucination Mitigation for Consistent Spatio-Temporal Generation
- [논문리뷰] HunyuanOCR-1.5: Making Lightweight OCR VLMs Faster and Better
- [논문리뷰] DOPD: Dual On-policy Distillation
- [논문리뷰] COrigami: An AI Pipeline for Co-Designing Flat-Foldable Visually Recognisable Origami
- [논문리뷰] Are Text-to-Image Models Inductivist Turkeys? A Counterfactual Benchmark for Causal Reasoning
Review 의 다른글
- 이전글 [논문리뷰] Perception or Prejudice: Can MLLMs Go Beyond First Impressions of Personality?
- 현재글 : [논문리뷰] PhysX-Omni: Unified Simulation-Ready Physical 3D Generation for Rigid, Deformable, and Articulated Objects
- 다음글 [논문리뷰] Q-ARVD: Quantizing Autoregressive Video Diffusion Models
댓글