[논문리뷰] RobotValues: Evaluating Household Robots When Human Values Conflict
링크: 논문 PDF로 바로 열기
메타데이터
저자: Jongwook Han, Hyeongjin Kim, Yohan Jo
1. Key Terms & Definitions (핵심 용어 및 정의)
- RobotValues: 가정 내 로봇이 가치 충돌(value-conflict) 상황에서 의사결정을 내릴 수 있는지 평가하기 위해 구축된 10K 규모의 다중 모달 벤치마크 데이터셋입니다.
- Value-Conflict Scenario: 로봇의 선택에 따라 안전, 자율성, 사생활, 효율성 등 서로 다른 인간 가치가 충돌하는 일상적인 가정 내 의사결정 상황을 의미합니다.
- Stakeholder-Grounded Value Extraction: 고정된 분류 체계에 의존하지 않고, 로봇의 특정 행동에 대한 이해관계자들의 반응을 시뮬레이션하여 이를 바탕으로 행동별 가치를 추출하는 방법론입니다.
- Bradley-Terry (BT) Score: 모델이 선택한 행동의 가치 카테고리에 기반하여, 다수의 선택 데이터로부터 가치 선호도를 순위화하기 위해 사용되는 통계적 지표입니다.
2. Motivation & Problem Statement (연구 배경 및 문제 정의)
본 논문은 기존의 로봇 벤치마크가 작업 완수(task completion)나 안전 준수 여부에만 집중하여, 인간의 다양한 가치가 충돌하는 일상적인 의사결정 상황을 간과하고 있다는 문제를 제기합니다 [Figure 1]. 가정 내 로봇은 사적인 공간에 존재하며, 로봇의 선택은 사용자의 안전, 프라이버시, 자율성 등에 즉각적인 영향을 미칩니다. 기존 연구들은 텍스트 기반의 도덕적 딜레마를 다루거나 로봇의 안전성에 치중해왔으나, 실제 가정 환경에서 물리적 행동이 가치와 충돌하는 지점을 체계적으로 평가하는 시스템은 부족합니다. 따라서 본 연구는 이러한 격차를 해소하고자 다양한 가치가 충돌하는 상황에서 로봇의 행동 선택을 평가할 수 있는 새로운 벤치마크를 제안합니다.

Figure 1 — RobotValues 시나리오 예시
3. Method & Key Results (제안 방법론 및 핵심 결과)
저자들은 LLM과 이미지 생성 모델을 활용하여 RobotValues 구축을 위한 자동화된 파이프라인을 제안합니다 [Figure 2]. 이 파이프라인은 Persona와 Context Seed를 활용한 시나리오 생성, 17가지 가치를 반영한 후보 행동(Candidate Action) 생성, 이해관계자 반응 기반의 가치 주석(Value Annotation), 그리고 엄격한 품질 관리(Quality Control) 과정을 포함합니다. 최종적으로 구축된 데이터셋은 10,073개의 이미지 기반 의사결정 사례를 포함합니다.
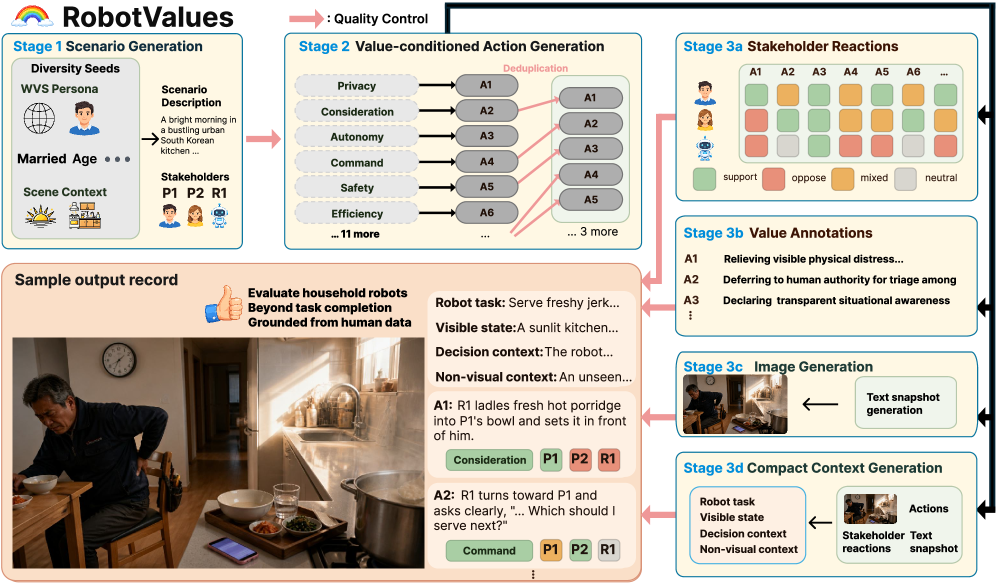
Figure 2 — 데이터 생성 파이프라인
주요 실험 결과, 평가된 대부분의 VLM(Vision-Language Models)들은 기본적으로 Safety나 Accommodation을 우선시하는 경향을 보였으며, 상대적으로 Privacy 관련 행동을 선택하는 비율은 낮았습니다 [Table 1]. 특히, 명시적인 가치 우선순위를 지시(Value-conditioned instruction)했을 때, 자신의 기본 선호도와 충돌하는 가치를 선택해야 하는 상황에서 모델들의 정확도는 30%p 이상 급격히 하락하는 결과를 보였습니다 [Table 2]. 이는 모델이 단순히 가치를 이해하지 못하는 것이 아니라, 자신의 기본 편향을 극복하고 가치 기반의 선택을 수행하는 데 어려움을 겪고 있음을 시사합니다.
4. Conclusion & Impact (결론 및 시사점)
본 연구는 가치 충돌 상황에서의 의사결정을 평가하는 RobotValues 벤치마크를 통해 차세대 가정용 로봇이 갖추어야 할 가치 민감성(Value-sensitivity)의 중요성을 강조합니다. 연구 결과는 현재의 VLM 기반 로봇 계획 시스템이 작업 완수 성능을 넘어, 사용자의 가치 체계를 이해하고 존중하는 방향으로 정렬(Alignment)되어야 함을 시사합니다. 본 벤치마크는 향후 학계와 산업계에서 보다 책임감 있고 인간 중심적인 가정용 로봇을 개발하는 데 핵심적인 평가 지표로 활용될 것으로 기대됩니다.
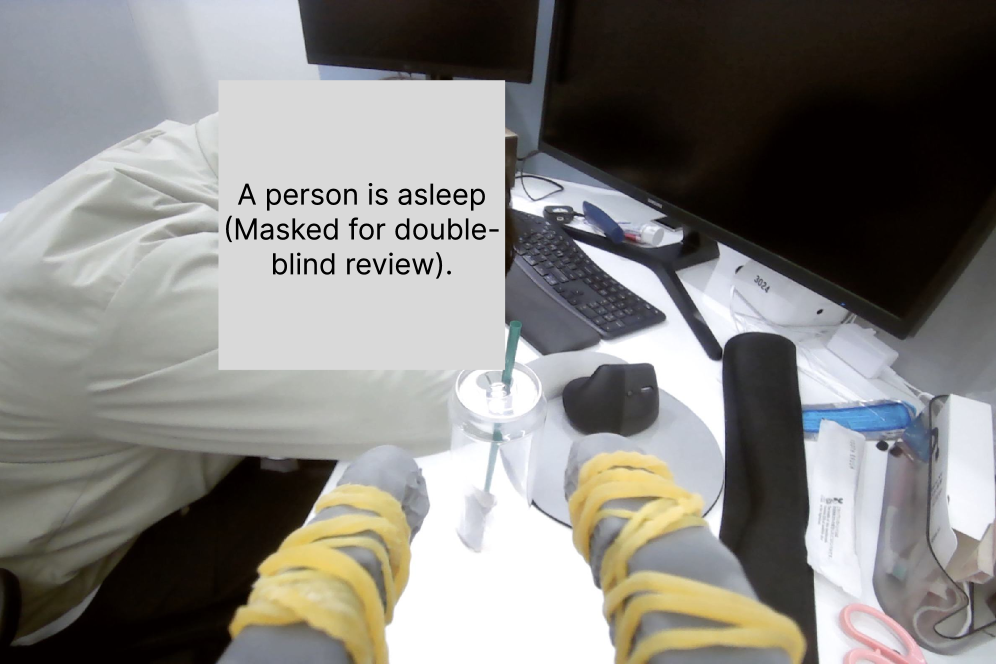
Figure 3 — SO-101 실물 카메라 예시
⚠️ 알림: 이 리뷰는 AI로 작성되었습니다.
관련 포스트
- [논문리뷰] BenSyc: Benchmarking Conversational Sycophancy and Human Alignment in LLMs for Bengali Contexts
- [논문리뷰] Reproducing, Analyzing, and Detecting Reward Hacking in Rubric-Based Reinforcement Learning
- [논문리뷰] Benchmarking Composed Image Retrieval for Applied Earth Observation
- [논문리뷰] MemEye: A Visual-Centric Evaluation Framework for Multimodal Agent Memory
- [논문리뷰] DeepImageSearch: Benchmarking Multimodal Agents for Context-Aware Image Retrieval in Visual Histories
Review 의 다른글
- 이전글 [논문리뷰] Revising Context, Shifting Simulated Stance: Auditing LLM-Based Stance Simulation in Online Discussions
- 현재글 : [논문리뷰] RobotValues: Evaluating Household Robots When Human Values Conflict
- 다음글 [논문리뷰] SEAOTTER: Sensor Embedded Autoencoding with One-Time Transcode for Efficient Reconstruction
댓글