[논문리뷰] Hy-Embodied-0.5-VLA: From Vision-Language-Action Models to a Real-World Robot Learning Stack
링크: 논문 PDF로 바로 열기
메타데이터
저자: He Zhang, Lingzhu Xiang, Haitao Lin, et al.
1. Key Terms & Definitions (핵심 용어 및 정의)
- VLA (Vision-Language-Action) Model: 시각적 관측치와 언어 지시사항을 입력받아 로봇의 제어 명령을 예측하는 엔드투엔드 모델입니다.
- Flow Matching: 복잡한 데이터 분포를 확률적 흐름(flow)으로 학습하여 연속적인 Action 예측을 가능하게 하는 생성 모델링 기법입니다.
- UMI (Universal Manipulation Interface): 로봇의 특정 기구학에 구애받지 않고 인간의 조작 데이터를 수집할 수 있는 범용 인터페이스 프레임워크입니다.
- Delta-chunk Action Representation: 이전 상태를 기준으로 미래의 행동을 증분(delta) 단위의 묶음(chunk)으로 예측하여 제어 효율과 임베딩 독립성을 높이는 방식입니다.
- FlowPRO: 보상 모델(Reward Model) 없이 성공/실패 궤적을 활용하여 정책을 개선하는 오프라인 강화학습 알고리즘입니다.
2. Motivation & Problem Statement (연구 배경 및 문제 정의)
본 연구는 파편화된 로봇 학습 시스템의 한계를 극복하고, 데이터 수집부터 실제 현장 배치(Deployment)까지를 아우르는 통합된 엔드투엔드 VLA 학습 스택을 구축하는 것을 목표로 합니다. 기존 모델들은 인간의 궤적을 활용할 때 발생하는 Action 라벨의 부정확성, 수동 장비(hand-held rig)의 한계, 그리고 로봇 간의 기구학적 차이(embodiment gap)를 효과적으로 해결하지 못했습니다. 또한, 표준적인 모방 학습(Imitation Learning)만으로는 정밀한 조작(dexterity) 구현이 어렵고, 강화학습 도입 시에는 학습이 어려운 보상 모델에 과도하게 의존하는 문제가 있습니다. 저자들은 이러한 물리적 하드웨어 제약과 데이터 부족 문제를 해결하기 위해 고정밀 데이터 수집부터 강화학습 사후 학습(post-training)까지 통합된 Hy-Embodied-0.5-VLA 시스템을 제안합니다 [Figure 1].
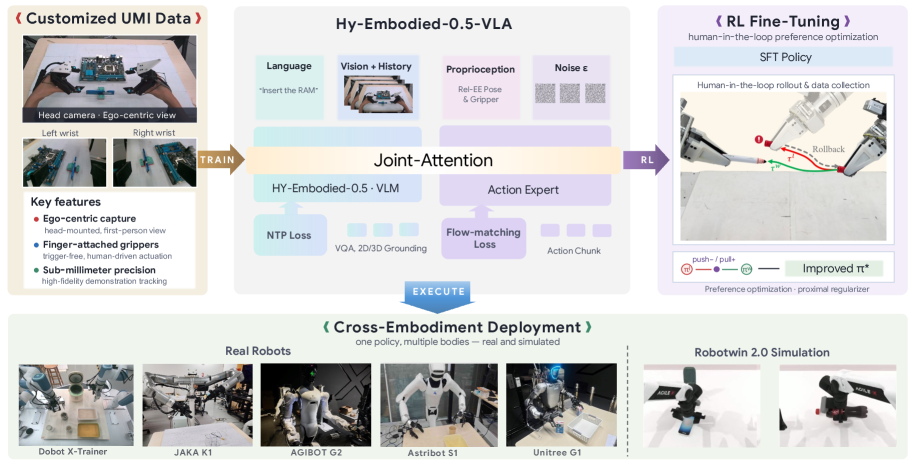
Figure 1 — HyVLA-0.5 시스템 개요
3. Method & Key Results (제안 방법론 및 핵심 결과)
본 논문은 Hy-Embodied-0.5 backbone을 중심으로 Flow Matching 기반의 Action expert와 시공간 어텐션을 결합한 Compact Memory Encoder를 탑재한 아키텍처를 제안합니다 [Figure 2]. 데이터 측면에서는 자체 개발한 fingertip UMI 장치와 모션 캡처 시스템을 활용하여 10,000시간 이상의 고정밀 데모 데이터를 확보하였으며, 이를 통해 Delta-chunk 표현 방식의 정책을 학습합니다. 강화학습 단계에서는 FlowPRO를 도입하여 보상 모델 없이도 실패 사례를 통한 능동적 정책 개선이 가능하도록 설계했습니다 [Figure 5]. 실험 결과, 본 시스템은 다양한 로봇 플랫폼으로의 범용적인 전이 학습(cross-embodiment transfer) 성능을 입증하였습니다. 특히, FlowPRO를 통해 기존 SFT(Supervised Fine-tuning) 대비 실패율을 유의미하게 낮추며 작업 성공률을 상위 수준(near-ceiling)으로 견인하는 정량적 성과를 달성하였습니다.
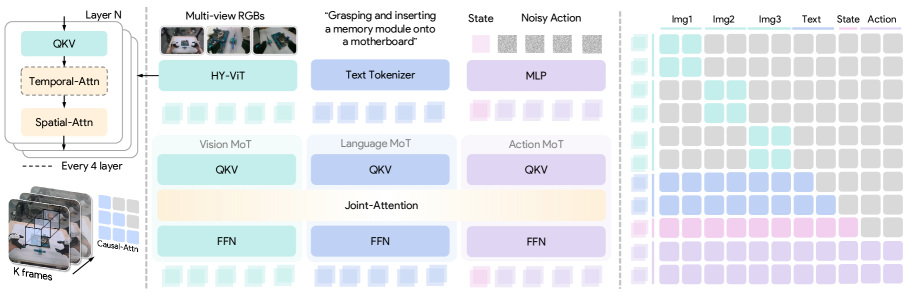
Figure 2 — 모델 아키텍처 구조
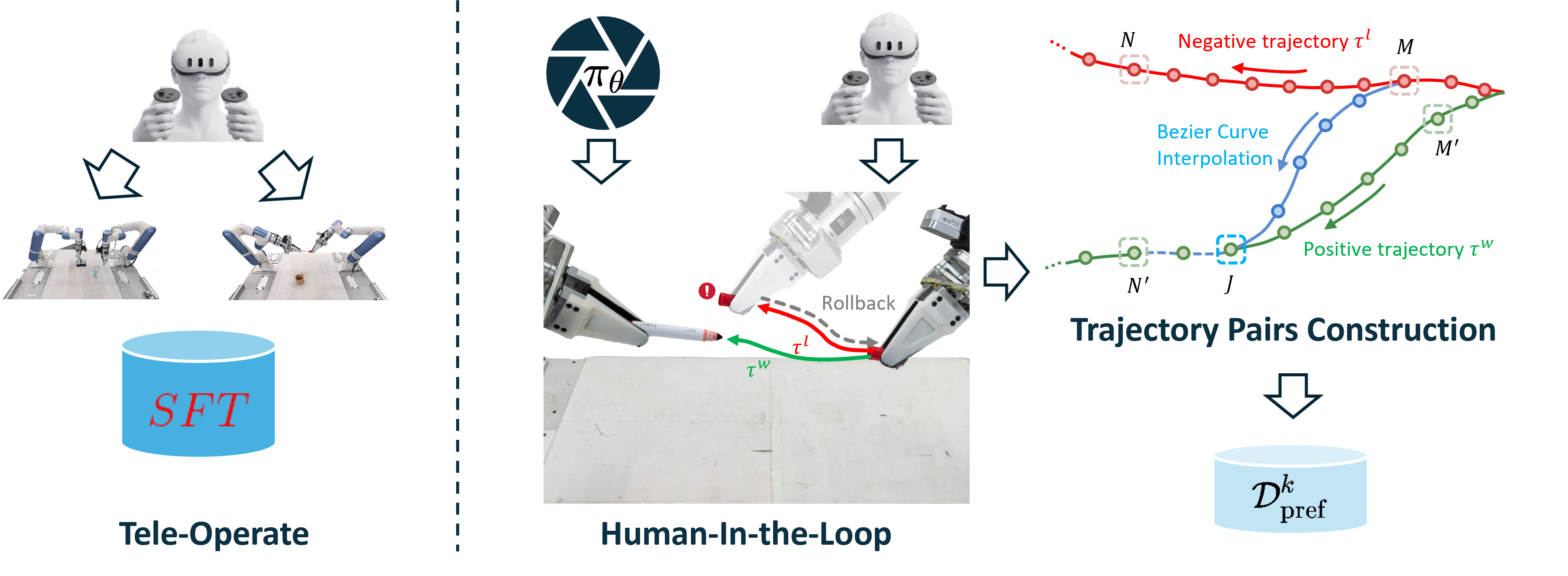
Figure 5 — FlowPRO 데이터 파이프라인
4. Conclusion & Impact (결론 및 시사점)
본 연구는 로봇 학습의 전 과정을 하나의 일관된 파이프라인으로 연결하여 일반화된 로봇 제어의 실용성을 대폭 향상시켰습니다. 특히, UMI 데이터를 활용한 Pre-training과 FlowPRO를 통한 사후 학습은 향후 현장 투입형 로봇 개발에 있어 중요한 방법론적 토대를 제공합니다. 이 연구는 학계의 이론적 연구와 산업계의 실제 로봇 배치 사이의 간극을 줄이는 데 크게 기여할 것으로 평가됩니다. 향후에는 더욱 다양한 로봇 형태와 환경에 대한 적응성을 강화하는 방향으로 연구가 확장될 것으로 기대됩니다.
⚠️ 알림: 이 리뷰는 AI로 작성되었습니다.
관련 포스트
- [논문리뷰] EmbodiedOneVision: Interleaved Vision-Text-Action Pretraining for General Robot Control
- [논문리뷰] ImageWAM: Do World Action Models Really Need Video Generation, or Just Image Editing?
- [논문리뷰] ACE-Ego-0: Unifying Egocentric Human and Robotic Data for VLA Pretraining
- [논문리뷰] Robots Need More than VLA and World Models
- [논문리뷰] Silent Failures in Physical AI: A Literature Review of Runtime Action Authorization for Autonomous Systems
Review 의 다른글
- 이전글 [논문리뷰] HarnessX: A Composable, Adaptive, and Evolvable Agent Harness Foundry
- 현재글 : [논문리뷰] Hy-Embodied-0.5-VLA: From Vision-Language-Action Models to a Real-World Robot Learning Stack
- 다음글 [논문리뷰] LLM Agents Can See Code Repositories
댓글