[논문리뷰] HumanScale: Egocentric Human Video Can Outperform Real-Robot Data for Embodied Pretraining
링크: 논문 PDF로 바로 열기
저자: Juncheng Ma, Jianxin Bi, Yufan Deng, et al.
## 1. Key Terms & Definitions (핵심 용어 및 정의)
- Embodied Foundation Models: 로봇의 시각적 관측을 기반으로 행동을 예측하거나 환경을 모델링하도록 학습된 파운데이션 모델입니다.
- Egocentric Human Video: 카메라 착용자(first-person) 시점에서 촬영된 일상 행동 영상 데이터로, 대규모 수집이 용이하고 환경적 다양성이 높습니다.
- Teleoperated Real-Robot Data: 숙련된 작업자가 원격 조종을 통해 생성한 로봇 데이터로, 정밀한 행동 레이블을 제공하지만 수집 비용이 높고 규모 확장에 한계가 있습니다.
- World-Action Model (WAM): 미래의 시각적 관측(video dynamics)과 행동(action inference)을 함께 학습하여 환경 변화를 예측하는 통합 아키텍처입니다.
- Out-of-Distribution (OOD): 학습 과정에서 관찰되지 않은 새로운 객체, 환경, 혹은 작업 시나리오를 의미합니다.
## 2. Motivation & Problem Statement (연구 배경 및 문제 정의)
- Embodied foundation model 학습의 핵심 병목 현상은 정밀하게 주석 처리된 고품질 로봇 데이터의 부족과 데이터 수집의 높은 비용입니다.
- 기존 연구들은 주로 teleoperated real-robot 데이터를 사용해 왔으나, 이는 데이터 확장성이 낮고 특정 환경에 국한된 좁은 행동 분포(narrow behavioral distribution)만을 제공한다는 한계가 있습니다.
- 저자들은 이 문제를 해결하기 위해 대규모로 수집 가능한 egocentric human video가 real-robot 데이터를 대체하거나 오히려 능가하는 pretraining source가 될 수 있다는 가설을 검증하고자 합니다 [Figure 1].
- 기존에는 저비용의 egocentric 데이터가 로봇의 구체적인 행동 공간(action space) 및 embodiment(신체 구성)와 일치하지 않아 성능에 대한 의문이 제기되어 왔습니다.
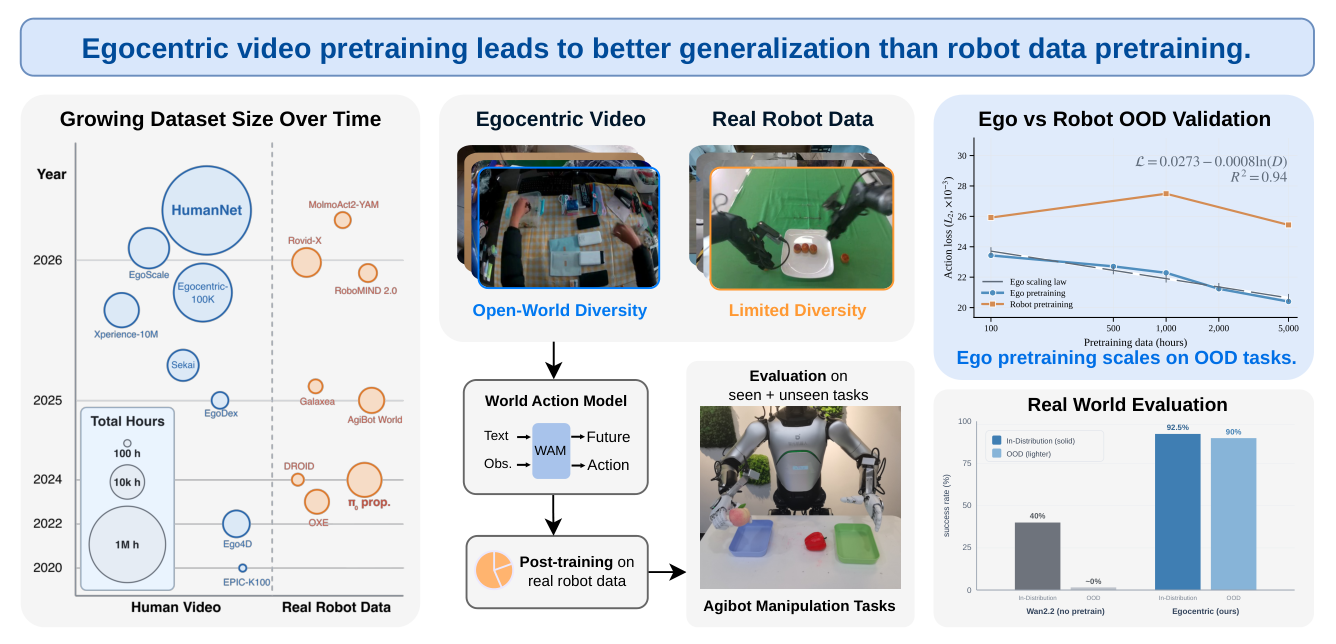
Figure 1 — 제안하는 연구의 전체적인 방향성과 egocentric 데이터의 장점을 한눈에 보여주는 다이어그램
## 3. Method & Key Results (제안 방법론 및 핵심 결과)
- 본 논문은 5,000시간 분량의 egocentric human video와 동일 규모의 real-robot 데이터를 사용하여 Mixture-of-Transformers (MoT) 기반의 WAM을 학습시킨 후, 실제 로봇 환경에서 post-training을 수행하는 통제된 비교 실험을 제안합니다.
- egocentric 데이터는 retargeting 기술을 통해 로봇과 동일한 action space로 변환되어 학습되며, 고유의 높은 시각적 다양성과 motion quality를 활용하여 모델이 일반적인 world representation을 더 효과적으로 학습하도록 유도합니다.
- 핵심 실험 결과로, 동일한 양의 pretraining 데이터 사용 시 egocentric 모델은 real-robot 모델 대비 real-robot 행동 예측에서 24% 낮은 validation loss를 달성했습니다 [Table 1].
- 실제 로봇 작업 실행 결과, egocentric pretraining 기반 모델은 in-distribution에서 92.5%, out-of-distribution에서 90.0%의 성공률을 기록하여, OOD 상황에서 0%에 그친 baseline 대비 월등한 일반화 성능을 입증했습니다 [Table 1].
- 실험 데이터 수치가 증가함에 따라 egocentric pretraining 모델은 지속적인 성능 향상을 보이며 log-linear scaling law를 따르는 반면, real-robot 데이터 모델은 특정 시점에서 성능이 정체(saturation)되는 경향을 확인했습니다.
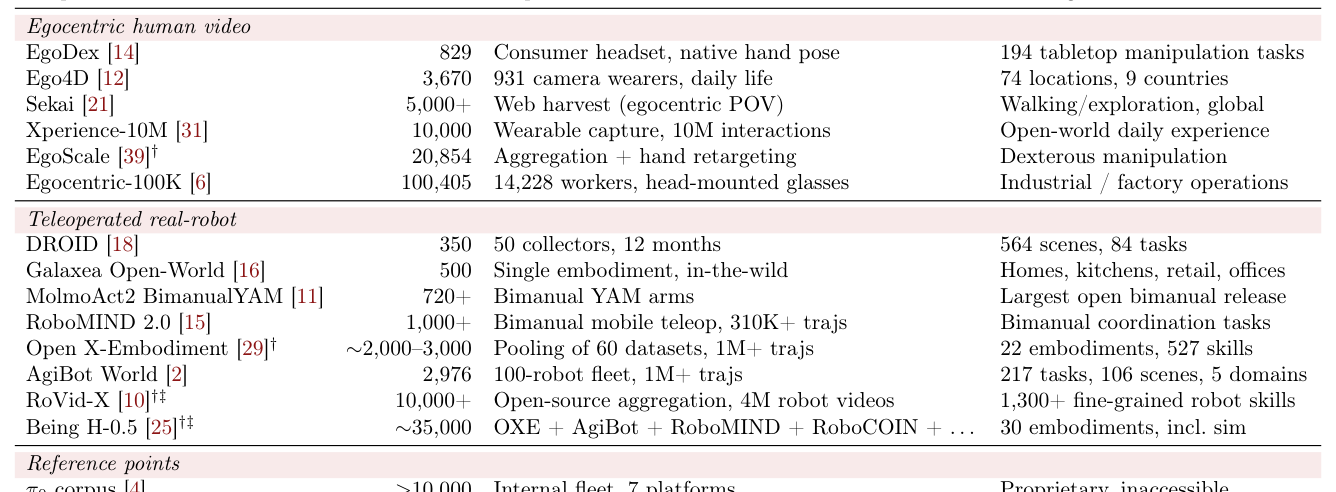
Table 1 — 기존 데이터셋들과 본 논문에서 활용하는 데이터의 규모 및 특징 비교
## 4. Conclusion & Impact (결론 및 시사점)
- 본 연구는 egocentric human video가 embodied pretraining의 가장 강력하고 효율적인 데이터 소스임을 실증적으로 입증하였습니다.
- 로봇 데이터의 물리적 정렬(kinematic alignment) 이점보다 egocentric 데이터의 방대한 규모와 다양성(diversity)이 downstream task의 일반화 성능에 훨씬 결정적인 역할을 함을 시사합니다.
- 이 발견은 향후 로봇 데이터 수집 전략을 효율화하고, 웹 규모의 human-centric 데이터 활용을 극대화하는 새로운 pretraining 패러다임을 제시하며 학계 및 산업계의 데이터 의존성 문제를 완화하는 데 크게 기여할 것입니다.
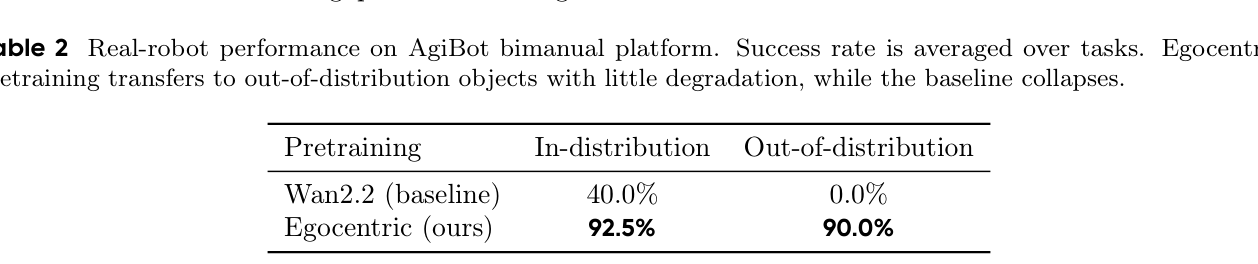
Table 2 — 제안 모델의 핵심 실험 결과인 성공률 비교
⚠️ 알림: 이 리뷰는 AI로 작성되었습니다.
관련 포스트
- [논문리뷰] VLA-JEPA: Enhancing Vision-Language-Action Model with Latent World Model
- [논문리뷰] EgoCS-400K: An Egocentric Gameplay Dataset for World Models
- [논문리뷰] WorldOlympiad: Can Your World Model Survive a Triathlon?
- [논문리뷰] Robots Need More than VLA and World Models
- [논문리뷰] daVinci-LLM:Towards the Science of Pretraining
Review 의 다른글
- 이전글 [논문리뷰] Holo-World: Unified Camera, Object and Weather Control for Video World Model
- 현재글 : [논문리뷰] HumanScale: Egocentric Human Video Can Outperform Real-Robot Data for Embodied Pretraining
- 다음글 [논문리뷰] ImageWAM: Do World Action Models Really Need Video Generation, or Just Image Editing?
댓글