[논문리뷰] PhysiFormer: Learning to Simulate Mechanics in World Space
링크: 논문 PDF로 바로 열기
메타데이터
저자: Yiming Chen, Yushi Lan, Andrea Vedaldi, et al.
## 1. Key Terms & Definitions (핵심 용어 및 정의)
- PhysiFormer: 3D mesh의 vertex 위치와 속도를 직접 입력받아 전체 물리적 궤적을 예측하는 Diffusion Transformer 기반의 모델입니다.
- World Space: 뷰(View)나 카메라 위치에 의존하지 않는 3D 좌표계 기반의 공간으로, 물리 법칙이 직접 적용되는 환경을 의미합니다.
- DiT (Diffusion Transformer): 잠재 공간이나 픽셀 공간이 아닌 raw 3D 좌표 공간에서 확산 모델을 수행하는 생성형 아키텍처입니다.
- Rigidity Loss: 객체의 초기 형상 정보와 비교하여 모델이 생성한 궤적에서 강체(Rigid object)의 형태적 일관성이 얼마나 보존되는지 측정하는 지표입니다.
- Momentum Drift Ratio: 초기 시스템의 물리적 관성이 시간에 따라 얼마나 유지되는지를 ground-truth와 비교하여 물리적 일관성을 평가하는 지표입니다.
## 2. Motivation & Problem Statement (연구 배경 및 문제 정의) 본 연구는 영상 기반의 물리 모델링이 겪는 뷰 의존성과 물리 법칙 위배 문제를 해결하고, 3D Mesh 수준에서 직접 물리 시뮬레이션을 수행하는 PhysiFormer를 제안합니다. 기존의 비디오 생성 모델은 픽셀 기반의 간접적인 표현을 사용하여 기하학적 정보와 동작을 정확히 분리하기 어렵고, 자율회귀(Autoregressive) 방식의 물리 시뮬레이터는 긴 시간의 궤적 생성 시 필연적으로 오류가 누적(Error accumulation)되어 객체의 형상이 변형되거나 안정성을 잃는 한계가 있습니다. 이러한 문제를 해결하기 위해 저자들은 3D 객체의 기하학적 구조를 그대로 유지하며 한 번의 forward pass로 전체 궤적을 생성하는 확률적 프레임워크가 필요함을 명시합니다 [Figure 1].
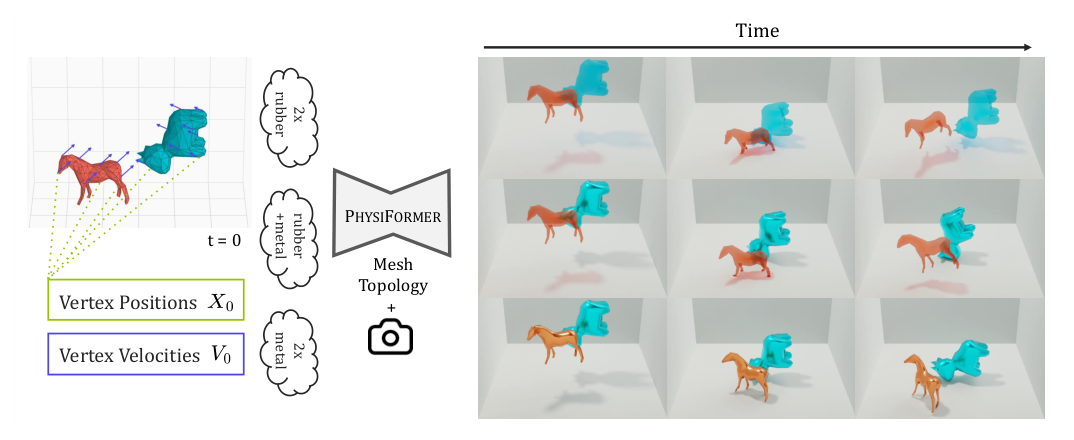
Figure 1 — PhysiFormer의 핵심 입출력 구조와 시뮬레이션 과정을 직관적으로 보여주는 다이어그램
## 3. Method & Key Results (제안 방법론 및 핵심 결과) PhysiFormer는 3D mesh의 vertex 정보를 입력받아 Diffusion Transformer를 통해 미래 궤적을 샘플링하는 통합형 모델입니다. 특히 시간(Time), 공간(Space), 객체(Object)에 대해 Factorized Attention을 적용하여, 복잡한 물리 시스템 내의 여러 객체를 permutation-invariant하게 추론합니다. 모델은 명시적인 물리 inductive bias 없이도 Raw 3D coordinate 공간에서 노이즈를 제거하는 과정을 통해 물리적 법칙을 학습하며, Material embedding을 통해 강체와 탄성체 간의 상이한 물리 거동을 효과적으로 구분합니다. 정량적 평가 결과, PhysiFormer는 기존의 자율회귀 모델들보다 훨씬 낮은 MSE를 기록하였으며, 장기적인 궤적 생성 시에도 Rigidity Loss 측면에서 월등한 형상 보존 능력을 보였습니다 [Table 2]. 또한, 학습 시 경험하지 못한 복잡한 기하 구조나 더 많은 객체 수에 대해서도 물리적으로 타당한 결과를 생성하며 뛰어난 일반화 성능을 입증하였습니다 [Figure 3].
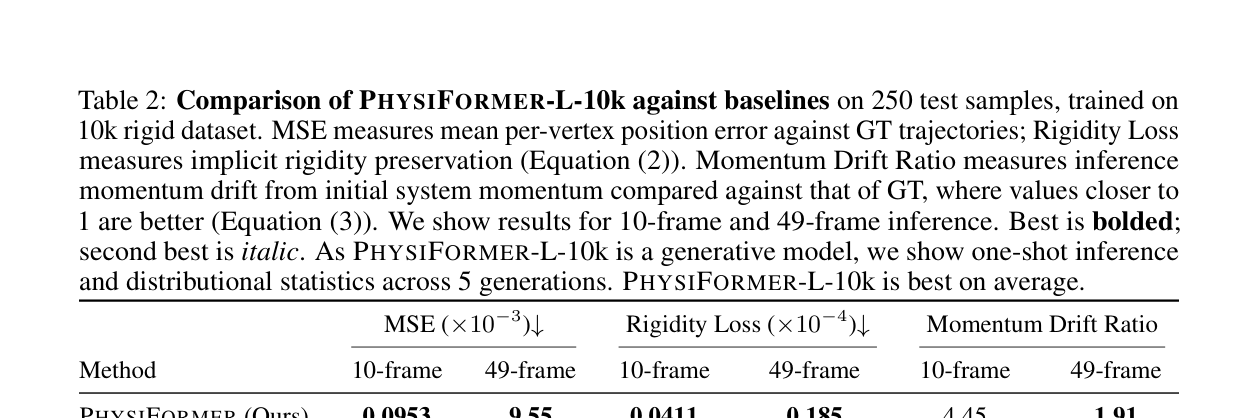
Table 2 — 제안 모델의 MSE, Rigidity Loss, Momentum Drift Ratio 등 주요 성능 지표를 비교한 핵심 테이블
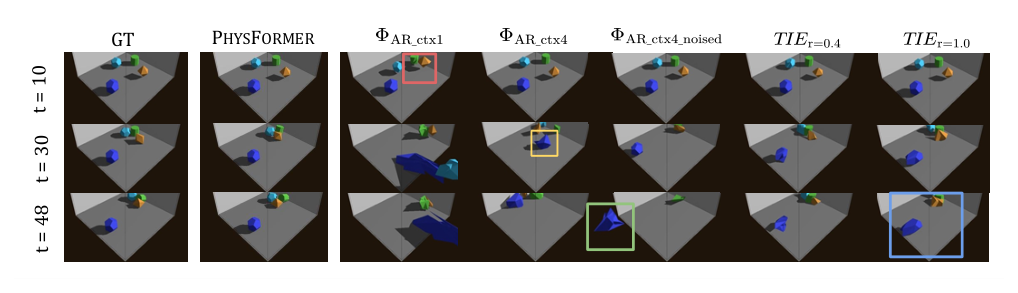
Figure 3 — 기존 autoregressive 모델들과의 시각적 성능 비교를 통해 모델의 형상 유지 및 물리적 타당성을 입증
## 4. Conclusion & Impact (결론 및 시사점) 본 논문은 3D mesh의 직접적인 확산 생성이 고전적인 물리 시뮬레이터를 대체할 수 있는 효율적이고 강력한 대안임을 입증하였습니다. 이 연구는 픽셀 의존적인 세계 모델의 한계를 극복하고 기하학적 일관성이 보장된 3D 세계 모델링의 새로운 이정표를 제시합니다. 향후 이러한 접근 방식은 로보틱스 시뮬레이션, 게임 물리 엔진, 고충실도 시각 콘텐츠 생성 등 다양한 산업 분야에서 컴퓨팅 효율성을 극대화하고 물리 시뮬레이션의 정확도를 높이는 데 크게 기여할 것으로 기대됩니다.
⚠️ 알림: 이 리뷰는 AI로 작성되었습니다.
관련 포스트
- [논문리뷰] TerraDiT-Ω: Unified Spatial Control for Satellite Image Synthesis with Any Geospatial Primitive
- [논문리뷰] MemLearner: Learning to Query Context memory for Video World Models
- [논문리뷰] Walking in the Implicit: Interactive World Exploration via Neural Scene Representation
- [논문리뷰] UnityShots: Memory-Driven Multi-Shot Audio-Video Generation with Boundary-Aware Gating
- [논문리뷰] TryOnCrafter: Unleashing Camera Trajectories for Realistic Video Virtual Try-on via a Renderable 4D Try-on Proxy
Review 의 다른글
- 이전글 [논문리뷰] OpenBioRQ: Unsolved Biomedical Research Questions for Agents
- 현재글 : [논문리뷰] PhysiFormer: Learning to Simulate Mechanics in World Space
- 다음글 [논문리뷰] Qwen-Image-Agent: Bridging the Context Gap in Real-World Image Generation
댓글