[논문리뷰] SIMART: Decomposing Monolithic Meshes into Sim-ready Articulated Assets via MLLM
링크: 논문 PDF로 바로 열기
저자: Chuanrui Zhang, Minghan Qin, et al.
1. Key Terms & Definitions (핵심 용어 및 정의)
- Sim-ready Articulated Assets : 물리 기반 시뮬레이션 및 로봇 상호작용에 즉시 활용 가능한, 관절 정보(kinematic information)를 포함하는 3D 객체.
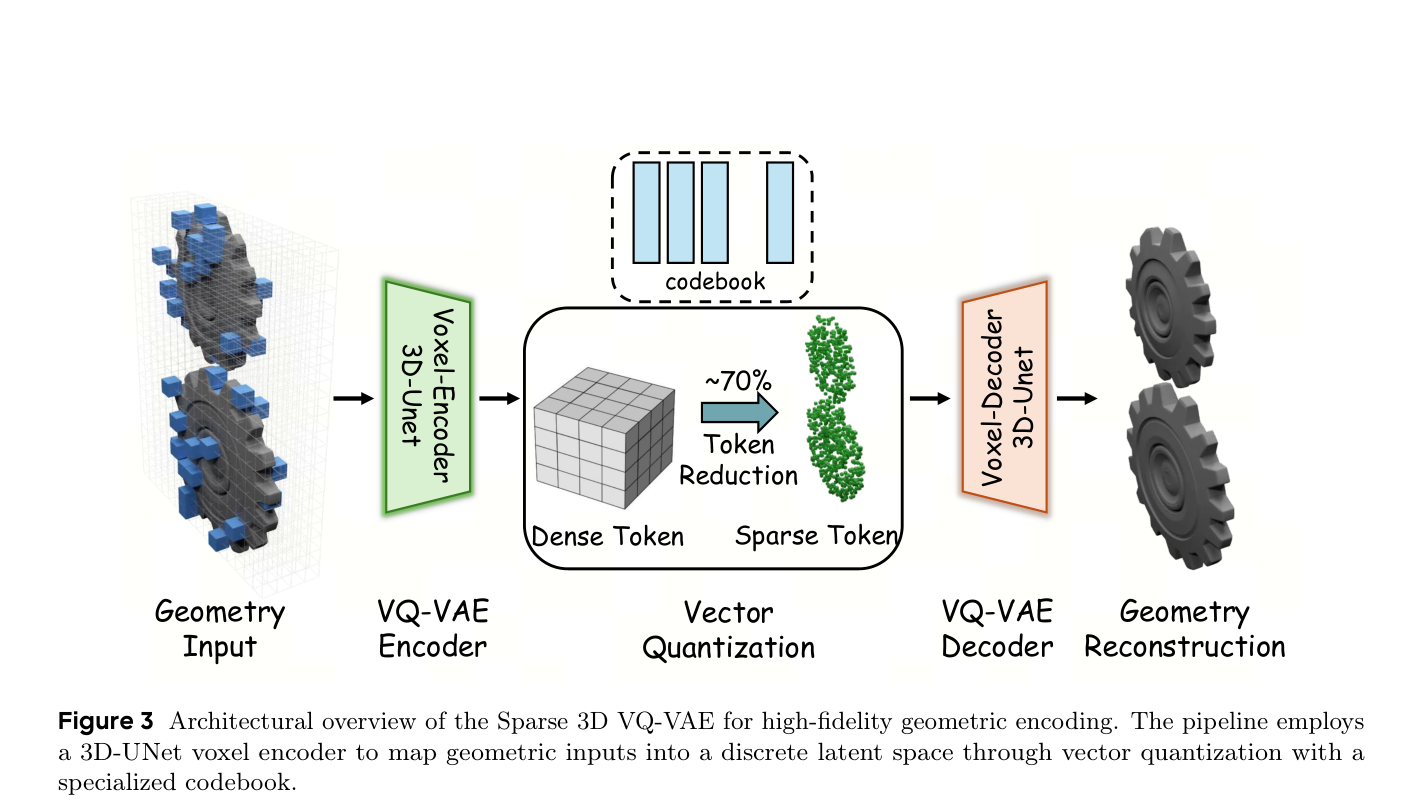
- Sparse 3D VQ-VAE : 3D 기하 정보를 효율적으로 인코딩하기 위해 제안된 VQ-VAE 변형으로, 비어 있는 공간(empty space)을 특수 토큰으로 처리하여 토큰 수를 70%까지 줄인다.
- URDF (Unified Robot Description Format) : 로봇의 물리적 특성 및 관절 구조를 XML 형식으로 기술하는 표준 파일 포맷.
- MLLM (Multimodal Large Language Model) : 이미지, 텍스트, 3D 기하 정보 등 다양한 모달리티를 이해하고 추론하여 처리하는 대규모 언어 모델.
- PartNet-Mobility : 관절형 3D 객체에 대한 세분화된 계층적 파트 수준 3D 객체 이해 벤치마크 데이터셋.
2. Motivation & Problem Statement (연구 배경 및 문제 정의)
최근 3D 생성 모델들은 고품질의 Static Meshes 를 생성하는 데 집중하고 있어, "Sim-ready"한 상호작용 가능한 객체를 만드는 데에는 한계가 있었습니다. 기존의 관절형 객체 생성 방법들은 대부분 파트 분해, 조인트 파라미터 추론, 조립 등 여러 단계를 거치는 Multi-stage Pipelines 에 의존했지만, 이러한 방식은 각 모듈에서 오류가 누적되어 기하학적 정확도(geometric fidelity)를 저해하고 물리적으로 유효하지 않은 관절(kinematic affordances)을 생성하기 쉬웠습니다. 특히, 기존 3D-native MLLM 시도들은 Dense Volumetric Encodings 를 사용하여 긴 3D 토큰 시퀀스와 높은 메모리 오버헤드를 발생시켜 복잡한 관절형 객체로의 확장성(scalability)을 제한하는 문제가 있었습니다. 이는 효율적이고 희소한(sparse) 3D 표현의 필요성을 강조합니다.
3. Method & Key Results (제안 방법론 및 핵심 결과)
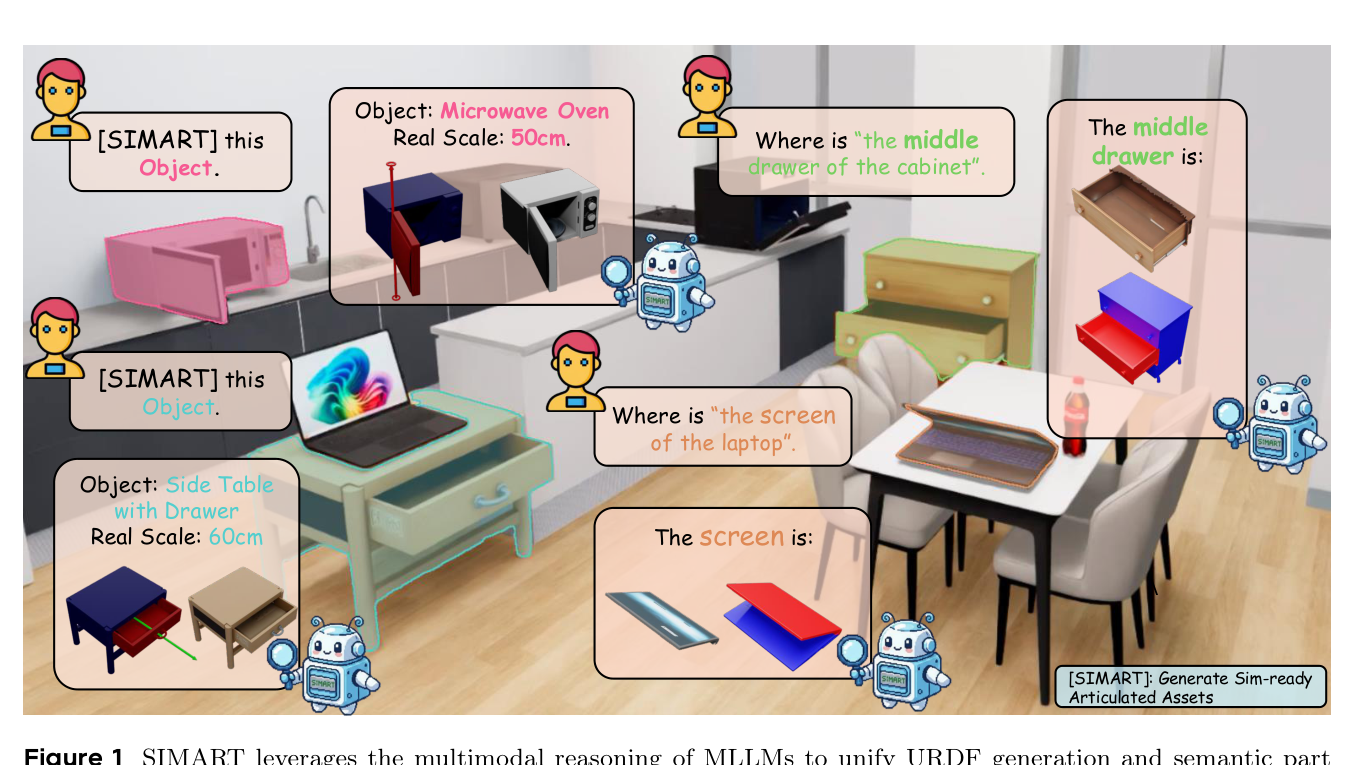
저자들은 이러한 한계를 극복하기 위해 SIMART 라는 통합 MLLM 프레임워크를 제안합니다. SIMART 는 파트 수준 분해(part-level decomposition)와 운동학적 예측(kinematic prediction)을 동시에 수행합니다. 핵심적으로, Sparse 3D VQ-VAE 를 도입하여 밀집된 복셀 기반 토큰(dense voxel tokens) 대비 토큰 수를 70% 까지 줄여, 복잡한 3D 메쉬의 효율적인 MLLM 처리 및 고충실도(high-fidelity) 다중 파트 조립을 가능하게 합니다. 이 프레임워크는 입력 3D 기하 정보를 Sparse 3D VQ-VAE 로 인코딩한 후, Qwen3-VL 기반의 Unified MLLM 백본을 통해 시각적(visual) 및 텍스트(textual) 입력과 융합하여 파트 그라운딩(part grounding) 및 조인트 파라미터 추정을 수행합니다
Sparse 3D VQ-VAE 는 3D-Unet 인코더를 사용하여 원본 64³ 그리드를 16×16×16 잠재 그리드로 매핑하고, 비어 있는 복셀에 대해 특수 Zero Token (ezero) 을 할당함으로써 효율성을 극대화합니다
SIMART 의 성능은 PartNet-Mobility 와 AI 생성 객체로 구성된 새로운 고충실도 벤치마크인 SIMART-Bench 를 통해 평가되었습니다. SIMART 는 Type Accuracy (↑) , Axis Error (↓) , Origin Error (↓) , Intersection over Union (IoU ↑) , Chamfer Distance (CD ↓) 등 모든 측정 지표에서 기존 최신 모델들을 크게 능가했습니다
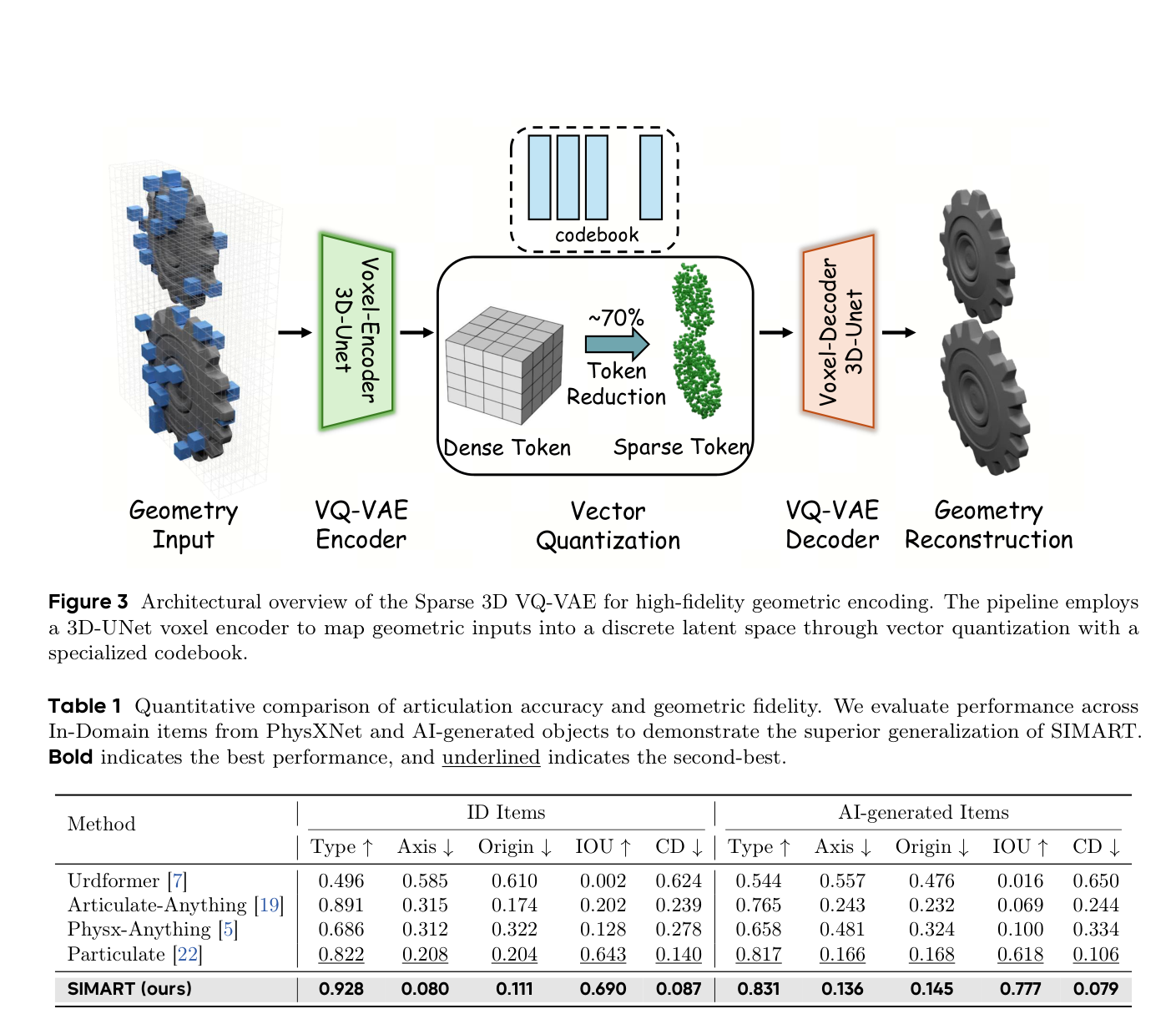
특히 AI 생성 객체 벤치마크에서 SIMART 는 IoU 0.777 과 CD 0.079 를 기록하며 다른 모델 대비 압도적인 기하학적 정확도와 관절 표현 능력을 보였습니다. Sparse 3D VQ-VAE 의 어블레이션 연구에서는 Zero Token 메커니즘이 Chamfer Distance 를 크게 감소시켜 재구성 품질을 향상시켰음이 확인되었습니다.
4. Conclusion & Impact (결론 및 시사점)
본 연구는 정적 3D 메쉬를 기능적이고 시뮬레이션 준비가 된(Sim-ready) 관절형 자산으로 변환하는 통합 MLLM 프레임워크인 SIMART 를 제안합니다. Sparse 3D VQ-VAE 를 통해 토큰 중복성을 70% 감소시켜 밀집된 복셀 표현의 메모리 과부하 문제를 해결하였으며, Qwen3-VL 백본을 활용하여 다양한 객체 범주에서 정밀한 파트 분해 및 조인트 파라미터 추정 능력을 입증했습니다. 또한, 고충실도 벤치마크인 SIMART-Bench 를 제안하여 관절 정확도 평가의 표준화된 측정 기준을 확립했습니다. 이 연구는 물리 기반 로봇 시뮬레이션 및 VR/AR 애플리케이션에서 사실적인 관절형 객체를 생성할 수 있는 기반을 마련하여, 로봇 학습, 가상 환경 상호작용, 혼합 현실 시나리오를 위한 Scalable 하고 Diverse 한 훈련 시나리오를 제공하는 등 학계 및 산업계에 큰 영향을 미칠 것으로 기대됩니다.
⚠️ 알림: 이 리뷰는 AI로 작성되었습니다.
관련 포스트
- [논문리뷰] Qwen-Image-Agent: Bridging the Context Gap in Real-World Image Generation
- [논문리뷰] LoomVideo: Unifying Multimodal Inputs into Video Generation and Editing
- [논문리뷰] Skyra: AI-Generated Video Detection via Grounded Artifact Reasoning
- [논문리뷰] EditThinker: Unlocking Iterative Reasoning for Any Image Editor
- [논문리뷰] OralGPT-Omni: A Versatile Dental Multimodal Large Language Model
Review 의 다른글
- 이전글 [논문리뷰] Rethinking Token-Level Policy Optimization for Multimodal Chain-of-Thought
- 현재글 : [논문리뷰] SIMART: Decomposing Monolithic Meshes into Sim-ready Articulated Assets via MLLM
- 다음글 [논문리뷰] Sparse but Critical: A Token-Level Analysis of Distributional Shifts in RLVR Fine-Tuning of LLMs
댓글