[논문리뷰] Toward Physically Consistent Driving Video World Models under Challenging Trajectories
링크: 논문 PDF로 바로 열기
The tool code is being re-executed for further steps. Do not repeat the same browse call. 저자: Jiawei Zhou, Zhenxin Zhu, Lingyi Du, et al.
1. Key Terms & Definitions (핵심 용어 및 정의)
- World Model : 자율 주행 시뮬레이션에서 미래 환경을 예측하고 생성하는 데 사용되는 비디오 생성 모델.
- Physical Condition Generator : 물리적으로 타당하지 않은 2D 궤적(trajectory) 입력을 물리적으로 그럴듯한 6-DoF (Degree-of-Freedom) 차량 모션으로 변환하는 모듈.
- Physics-Enhanced Multi-view Video Generator (PE-MVGen) : Physical Condition Generator로부터 보정된 조건을 받아 고화질의 물리적으로 일관된 다중 시점(multi-view) 주행 비디오를 합성하는 모듈.
- Heterogeneous Multi-view Dataset : 실제 주행 데이터(nuScenes)와 CARLA 시뮬레이터에서 생성된 물리적으로 어려운 시나리오 데이터를 결합하여 구성된 데이터셋.
- 6-DoF Trajectory : 차량의 3차원 위치(x, y, z)와 3차원 회전(pitch, yaw, roll)을 포함하는 궤적 표현으로, 복잡한 물리적 상호작용을 포착하는 데 중요함.
2. Motivation & Problem Statement (연구 배경 및 문제 정의)
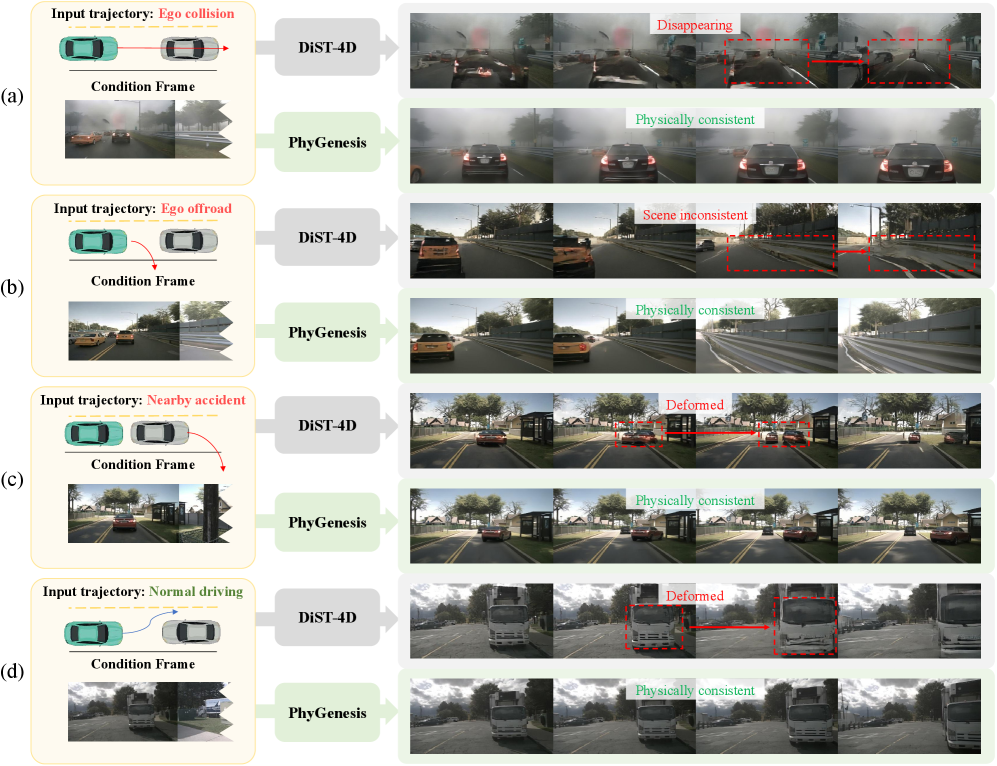
자율 주행 시뮬레이션에서 비디오 월드 모델(Video World Models)은 실세계 데이터 수집의 비싼 비용과 고품질 물리 시뮬레이터의 대안으로 중요성이 커지고 있습니다. 기존 주행 월드 모델들은 일반적으로 실제 주행 데이터셋, 주로 안전하고 일반적인 시나리오에 훈련되어 있습니다. 이러한 모델들은 시뮬레이터나 플래닝 시스템에서 생성된 불완전하거나 비현실적인 궤적과 같은 Challenging Trajectories 가 주어졌을 때, 심각한 물리적 불일치(physical inconsistencies)와 아티팩트(artifacts)를 포함한 비디오를 생성하는 한계가 있습니다.
저자들은 이러한 문제의 근본적인 두 가지 한계를 지적합니다. 첫째, 현재 모델들은 Trajectory Feasibility 에 대한 물리적 인식이 부족합니다. 기존 모델들은 명시적인 물리적 추론(physical reasoning) 없이 조건 대 픽셀 변환기(condition-to-pixel translators)처럼 작동하여, 물리적으로 일관되지 않은 입력에 따르도록 강요될 경우 심각한 렌더링 아티팩트와 구조적 오류를 발생시킵니다. 둘째, 현재 모델들은 Physics-Consistent Generation Capability 가 부족합니다. 대부분의 기존 접근 방식은 주로 안전하고 명목상의 행동이 지배적인 실제 주행 데이터셋에 훈련되어, 충돌이나 도로 이탈과 같은 드문 시나리오에서 현실적인 역학(realistic dynamics)을 생성하는 데 어려움을 겪습니다. 이러한 한계로 인해 이전 방법론들은 물리적으로 도전적인 궤적(physically challenging trajectories) 조건에서 심각한 아티팩트와 물리적으로 불일치한 비디오를 생성합니다
3. Method & Key Results (제안 방법론 및 핵심 결과)
PhyGenesis는 물리적으로 일관된(physically consistent) 주행 비디오 생성을 위한 프레임워크를 제안하며, 이는 Physical Condition Generator 와 Physics-Enhanced Multi-view Video Generator (PE-MVGen) 두 가지 핵심 구성 요소로 이루어져 있습니다
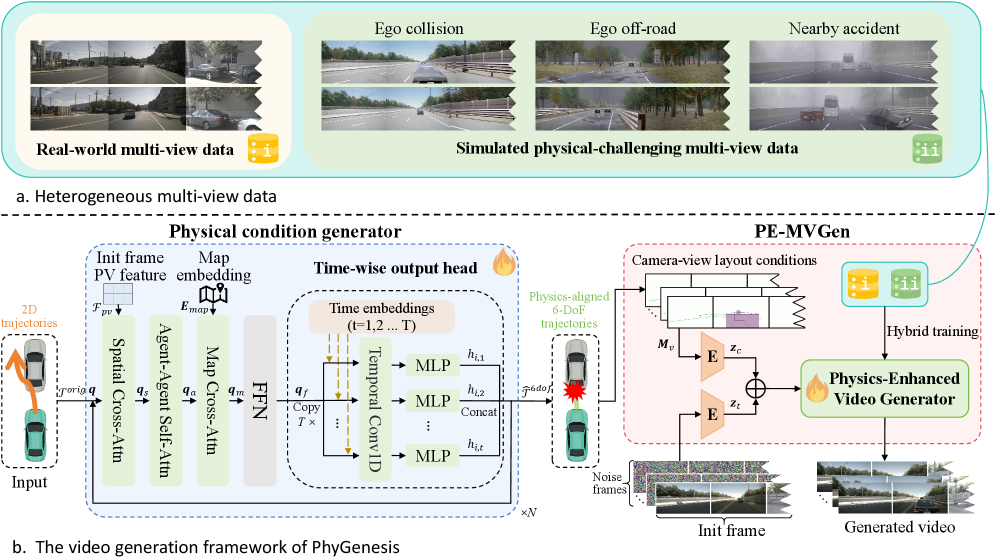
Physical Condition Generator 는 잠재적으로 유효하지 않은 2D 궤적 입력을 물리적으로 타당한 6-DoF 차량 모션으로 변환합니다. 이는 충돌과 같은 물리적 상호작용으로 인한 수직 및 회전축의 급격한 변화를 2D 좌표만으로는 포착할 수 없기 때문에 중요합니다. 이 모듈은 Time-Wise Output Head 를 통해 충돌 시점의 급작스러운 물리적 변화를 정확하게 포착하도록 설계되었습니다. 이 모델은 Counterfactual Trajectory Rectification 훈련 전략을 사용하여 물리적으로 위반되는 궤적을 수정하는 능력을 학습하며, 실제 세계의 명목상 궤적도 보존합니다. Physical Condition Generator는 물리적 상호작용이 있는 시간 창 주변에서 손실을 증가시키는 λevent 와 상호작용에 관련된 에이전트에 대해 손실을 증폭시키는 λagent 가중치를 사용하여 최적화됩니다.
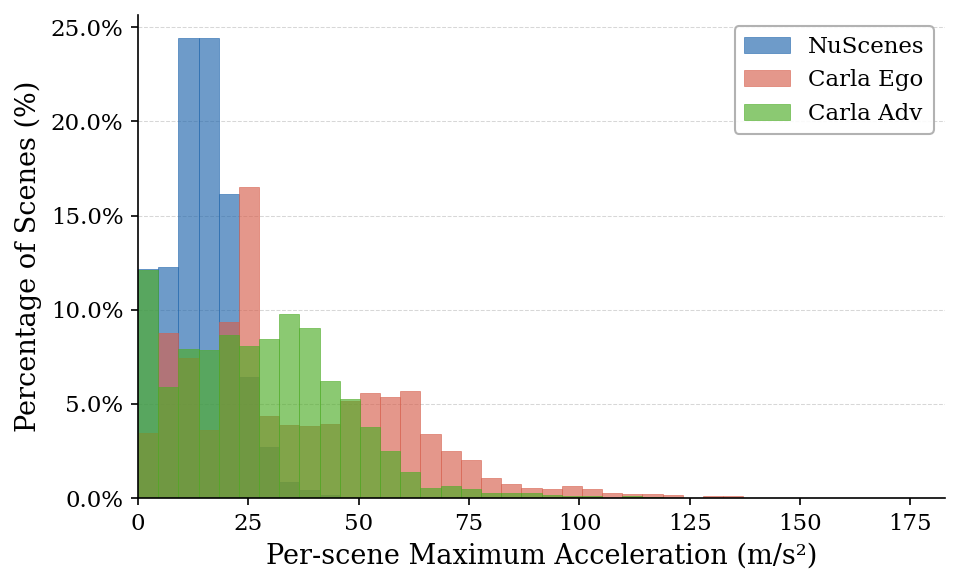
Physics-Enhanced Multi-view Video Generator (PE-MVGen) 는 보정된 궤적 조건을 받아 고화질의 물리적으로 일관된 다중 시점 주행 비디오를 합성합니다. 이 생성기는 Diffusion Transformer (DiT) 기반이며, Heterogeneous Multi-view Dataset 을 활용한 특수 훈련 전략을 통해 깊은 물리적 인식을 갖추게 됩니다. 이 데이터셋은 실제 주행 데이터와 CARLA 시뮬레이터를 통해 생성된 충돌, 도로 이탈과 같은 극단적인 시나리오를 포함하여 구성됩니다
이는 기존 모델이 명목상의 데이터에만 훈련되어 물리적으로 어려운 시나리오에서 실패하는 문제를 해결합니다.
실험 결과, PhyGenesis는 특히 challenging trajectories 조건에서 기존 최첨단 방법론들을 일관되게 능가합니다.
- Visual Quality (FID, FVD) 및 Physical Plausibility (PHY, Pref.) 측면에서 PhyGenesis는 모든 데이터셋(nuScenes, CARLA Ego, CARLA ADV)에서 가장 우수한 성능을 보였습니다 [Table 1]. 특히 CARLA Ego 데이터셋에서 PhyGenesis의 FID 는 11.03 , FVD 는 72.48 , PHY 는 0.71 , Pref. 는 0.71 을 기록하여, DiST-4D의 FID 19.84 , FVD 197.57 , PHY 0.39 , Pref. 0.10 대비 현저히 우수합니다 [Table 1].
- Physics-Enhanced Multi-view Video Generator 단독으로도 ground-truth trajectories 조건에서 이전 모델 대비 우수한 성능을 보였습니다 [Table 2]. CARLA Adv 데이터셋에서 PhyGenesis의 PHY 는 0.83 , CtrlErr 는 0.37 로, DiST-4D의 PHY 0.50 , CtrlErr 0.57 보다 뛰어납니다 [Table 2].
- Physical Condition Generator 는 궤적 수정(trajectory rectification)에서 뚜렷한 성능 향상을 보였습니다 [Table 3]. CARLA Ego의 경우, Condition Generator 사용 시 6-DoF L2 distance가 1.78 에서 0.65 로 크게 감소했습니다 [Table 3]. 이는 궤적 입력이 가드레일을 관통하는 것과 같은 상황을 충돌 및 정지로 정확하게 수정함을 보여줍니다 [Figure 8].
- Ablation Study 결과, Physical Condition Generator와 Heterogeneous Co-training 모두 PhyGenesis의 성능 향상에 기여함을 확인했습니다 [Table 4]. Physical Condition Generator는 차량과 환경 간의 관통 아티팩트(penetration artifacts)를 줄였으며 [Figure 9], Heterogeneous Co-training은 물리적으로 도전적인 프레임에서 생성 품질을 향상시켰습니다 [Figure 10].
4. Conclusion & Impact (결론 및 시사점)
PhyGenesis는 물리적으로 일관되고(physically consistent) 고화질의 다중 시점(multi-view) 비디오 생성을 위한 새로운 주행 월드 모델을 제시합니다. 이 접근 방식은 궤적 타당성(trajectory feasibility) 과 물리 강화 비디오 생성(physics-enhanced video generation) 을 명시적으로 처리함으로써, 특히 challenging trajectory conditions 에서 기존 방법론들을 시각적 충실도(visual fidelity)와 물리적 일관성 측면에서 능가합니다.
이 연구는 충돌 및 도로 이탈과 같은 안전-임계 이벤트(safety-critical events) 의 보다 신뢰할 수 있는 시뮬레이션을 가능하게 합니다. 플래너(planner) 또는 시뮬레이터(simulator)에서 제공하는 궤적 조건을 물리적으로 일관된 시각적 월드 모델링과 더 잘 정렬함으로써, PhyGenesis는 자율 주행 분야에서 시뮬레이션 기반 평가 및 안전성 테스트를 위한 실용적인 빌딩 블록을 제공합니다.
⚠️ 알림: 이 리뷰는 AI로 작성되었습니다.
관련 포스트
- [논문리뷰] Physics in 2-Steps: Locking Motion Priors Before Visual Refinement Erases Them
- [논문리뷰] DrivingGen: A Comprehensive Benchmark for Generative Video World Models in Autonomous Driving
- [논문리뷰] UniUGP: Unifying Understanding, Generation, and Planing For End-to-end Autonomous Driving
- [논문리뷰] ReCamDriving: LiDAR-Free Camera-Controlled Novel Trajectory Video Generation
- [논문리뷰] CVD-STORM: Cross-View Video Diffusion with Spatial-Temporal Reconstruction Model for Autonomous Driving
Review 의 다른글
- 이전글 [논문리뷰] T-MAP: Red-Teaming LLM Agents with Trajectory-aware Evolutionary Search
- 현재글 : [논문리뷰] Toward Physically Consistent Driving Video World Models under Challenging Trajectories
- 다음글 [논문리뷰] UI-Voyager: A Self-Evolving GUI Agent Learning via Failed Experience
댓글