[논문리뷰] AlloSpatial: Agentic Harness Framework for Spatial Reasoning in Foundation Models
링크: 논문 PDF로 바로 열기
메타데이터
저자: Shouwei Ruan, Bin Wang, Zhenyu Wu, Qihui Zhu, Yuxiang Zhang, Jingzhi Li, Yubin Wang, Xingxing Wei
1. Key Terms & Definitions (핵심 용어 및 정의)
- World2Mind: egocentric 관측 데이터를 query 가능한 구조적 allocentric 공간 정보(allocentric spatial priors)로 변환하는 플러그 앤 플레이 방식의 인지 매핑 샌드박스입니다.
- Allocentric-Spatial Tree (AST): 환경 내 랜드마크를 노드로 하고, 그들 간의 기하학적 관계, 포함 관계, 속성을 인코딩한 방향성 비순환 그래프(DAG) 형태의 공간 메모리 표현입니다.
- Spatial Reasoning Harness: 모델의 도구 사용을 제어하고, 모달리티 간 정보 수집 및 geometry-semantic 간의 충돌 검증을 수행하여 추론의 신뢰성을 보장하는 3단계 프로토콜입니다.
- Harness-Gated Trajectory Reward (HGTR): 긴 도구 사용 궤적 전체를 평가하며, 추론 구조 준수, 도구 호출의 유효성, 답변 정확도를 통합하여 최적화하는 RL 보상 메커니즘입니다.
2. Motivation & Problem Statement (연구 배경 및 문제 정의)
본 논문은 Multimodal Foundation Models (MFMs)가 물리적 세계의 3D 공간을 추론하는 데 있어 근본적인 한계를 지니고 있음을 지적합니다. 현재의 MFMs는 주로 국소적이고 일시적인 egocentric 관측에 의존하며, 이를 전역적이고 지속적이며 질의 가능한 정신적 표현으로 변환할 능력이 부족합니다. 기존 연구들은 vision-centric 혹은 geometry-centric 접근을 통해 공간 인지를 개선하려 했으나, 여전히 학습 분포에 과도하게 의존하거나 모달리티 간 정렬(alignment) 문제로 인해 일반화 성능이 낮습니다. 또한, 최근의 tool-augmented 방식들은 오류가 발생하기 쉬운 긴 추론 체인에 의존하거나, 노이즈가 섞인 도구 출력을 비판 없이 수용한다는 문제점이 있습니다. 따라서 본 논문은 이러한 한계를 극복하기 위해 구조화된 allocentric 표현과 능동적인 도구 활용 및 검증을 결합한 AlloSpatial 프레임워크를 제안합니다 [Figure 1].
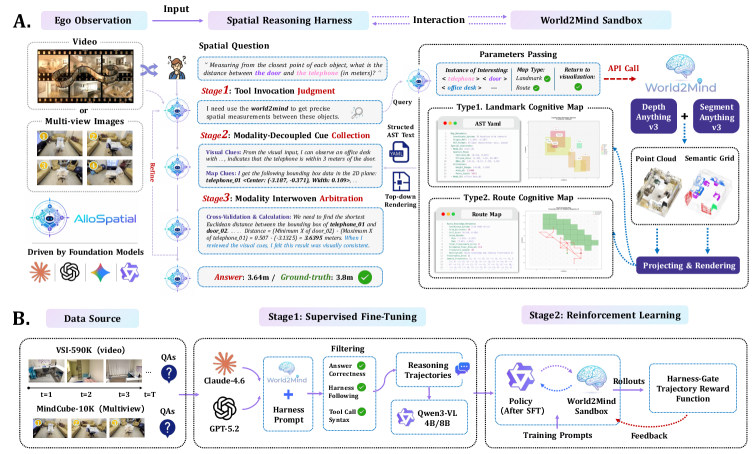
Figure 1 — AlloSpatial 추론 및 학습 파이프라인
3. Method & Key Results (제안 방법론 및 핵심 결과)
본 논문은 AlloSpatial을 통해 egocentric 비디오나 이미지 시퀀스를 query 가능한 AST 기반의 공간 정보로 변환하는 과정을 제안합니다. 제안된 World2Mind는 기하학적 정보와 의미론적 마스크를 결합하여 sparse하지만 신뢰할 수 있는 전역적 공간 지도를 생성합니다. Spatial Reasoning Harness는 추론 과정에서 모델이 필요한 도구를 호출할지 판단하고, 모달리티별로 정보를 수집한 뒤 최종 답변 전에 geometry-semantics 간의 충돌을 중재(arbitration)하도록 설계되었습니다 [Figure 1]. 또한, 이를 open-weight 모델인 Qwen3-VL에 내재화하기 위해 supervised cold-start fine-tuning 후 HGTR을 적용한 RL 학습을 수행합니다. 실험 결과, AlloSpatial은 training-free 설정에서 기존 proprietary 모델들 대비 VSI-Bench 및 MindCube 벤치마크에서 5%–18%의 성능 향상을 기록했습니다 [Table 1]. 특히, 시각적 입력이 제거된 환경에서도 AST만으로 강력한 공간 추론 성능을 보였으며, RL 학습된 에이전트는 더 큰 일반 목적 모델 및 경쟁 베이스라인을 상회하는 성능을 달성하였습니다.
4. Conclusion & Impact (결론 및 시사점)
본 연구는 구조화된 allocentric 표현과 에이전트 기반의 추론 프로토콜이 MFMs의 공간 인지 한계를 극복하는 핵심 동력이 될 수 있음을 입증했습니다. AlloSpatial은 단순히 고해상도 시각 정보를 처리하는 것을 넘어, 공간 지식을 외부 도구와 상호작용하며 능동적으로 검증할 수 있는 프레임워크를 제시했다는 점에서 큰 의의가 있습니다. 이 접근 방식은 로봇공학이나 자율 주행과 같이 물리적 환경에 대한 신뢰할 수 있는 3D 추론이 필수적인 분야에서 Foundation Model의 실용적 활용도를 크게 높일 것으로 기대됩니다.
⚠️ 알림: 이 리뷰는 AI로 작성되었습니다.
관련 포스트
- [논문리뷰] Thinking with Visual Grounding
- [논문리뷰] Thinking with Imagination: Agentic Visual Spatial Reasoning with World Simulators
- [논문리뷰] MechVQA: Benchmarking and Enhancing Multimodal LLMs on Comprehensive Mechanical Drawing Understanding
- [논문리뷰] Eliciting Complex Spatial Reasoning in MLLMs through Wide-Baseline Matching
- [논문리뷰] AtlasVA: Self-Evolving Visual Skill Memory for Teacher-Free VLM Agents
Review 의 다른글
- 이전글 [논문리뷰] AdaSR: Adaptive Streaming Reasoning with Hierarchical Relative Policy Optimization
- 현재글 : [논문리뷰] AlloSpatial: Agentic Harness Framework for Spatial Reasoning in Foundation Models
- 다음글 [논문리뷰] An Enigma of Artificial Reason: Investigating the Production-Evaluation Gap in Large Reasoning Models
댓글