[논문리뷰] Large-Scale Tunnel Air-Ground Collaboration With FLISP: Fast LiDAR-IMU Synchronized Path Planner
링크: 논문 PDF로 바로 열기
메타데이터
저자: Fenghe Guo, Runjie Shen, et al.
1. Key Terms & Definitions (핵심 용어 및 정의)
- FLISP (Fast LiDAR-IMU Synchronized Path Planner): 맵(Map) 기반의 고비용 연산이나 SLAM 드리프트 문제없이, UGV의 LiDAR-IMU 데이터만을 활용하여 UGV와 UAV의 경로를 동시에 생성하는 mapless 협업 프레임워크입니다.
- Hierarchical Collaboration: UGV가 메인 perception/planning 엔진 역할을 수행하고, UAV는 UGV의 경로로부터 파생된 안전 제약 조건을 기반으로 비행 경로를 생성하는 비대칭적 협업 모델입니다.
- Degenerate Environments: 터널 내부와 같이 빛이 부족하고 텍스처가 균일하며, 구조적 반복성이 강해 전통적인 SLAM이나 시각 센서 기반 탐색이 실패하기 쉬운 환경을 지칭합니다.
- Firefly Algorithm (FA): 본 연구에서 UGV의 실시간 장애물 회피 경로를 최적화하기 위해 사용된 휴리스틱 알고리즘으로, 기존 샘플링 방식보다 효율적인 계산을 보장합니다.
2. Motivation & Problem Statement (연구 배경 및 문제 정의)
대규모 수력 발전 터널과 같은 대형 인프라 점검은 현재 수작업에 의존하고 있어 매우 위험하고 비효율적입니다. 기존의 map-based multi-robot 시스템은 이러한 긴 터널 환경에서 SLAM 드리프트와 계산 부하 문제로 인해 안정적인 운용이 어렵습니다. 또한, 터널의 좁고 기하학적으로 단순한 공간 구조는 범용적인 경로 계획 알고리즘의 적용을 제약합니다. 저자들은 이러한 한계를 극복하기 위해 실시간성이 높고 드리프트에 강건한 새로운 협업 경로 계획 전략을 제안합니다 [Figure 1].

Figure 1 — 터널 내 탐색 환경의 어려움
3. Method & Key Results (제안 방법론 및 핵심 결과)
본 논문은 UGV에 장착된 LiDAR-IMU를 유일한 센서 suite로 활용하여 전체 시스템의 경로를 결정하는 계층적(hierarchical) mapless 프레임워크를 제안합니다 [Figure 5]. UGV 경로 계획은 yaw angle 기반의 적응형 binning을 통해 tunnel centerline을 추정하고, Bayesian 필터를 통해 센서 노이즈를 제거하여 안정적인 3D 궤적을 확보합니다 [Figure 9]. UAV의 비행 경로는 UGV가 생성한 경로에 통신 안전 제약 조건을 결합하여 실시간으로 도출됩니다 [Figure 2]. 성능 평가 결과, FLISP는 1.2km 길이의 터널 환경에서 100%의 성공률을 기록했습니다. 기존 grid-based 방법 대비 약 7배의 속도 향상을 보였으며, sampling-based baseline들과 비교하여 3차원 자릿수(three-order-of-magnitude) 이상의 효율성 개선을 달성했습니다 [Table N - 본 논문의 성능 분석 결과]. 특히, 제안된 시스템은 실시간 제어 사이클 내에서 약 7 ms의 낮은 Latency를 달성하여 고속 탐색이 가능함을 입증했습니다.
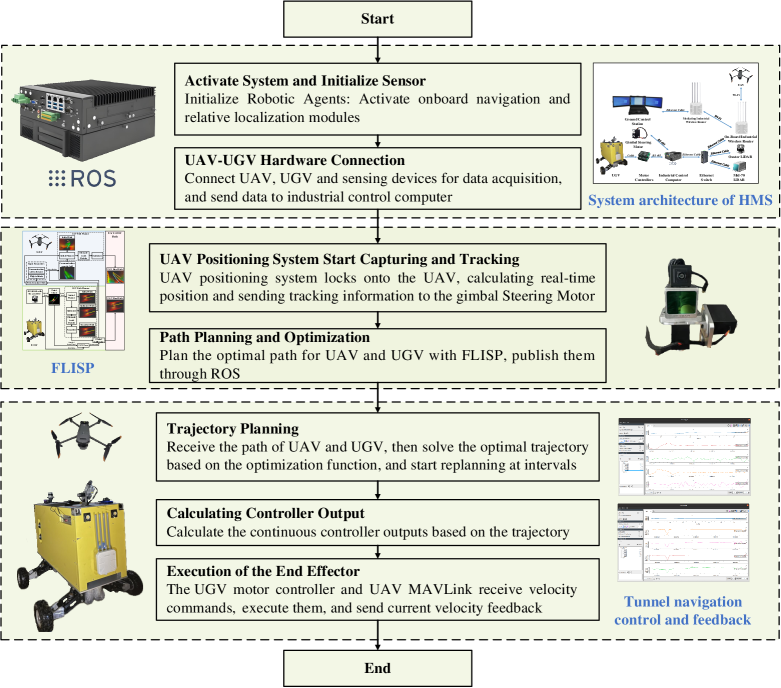
Figure 2 — 시스템 전체 아키텍처
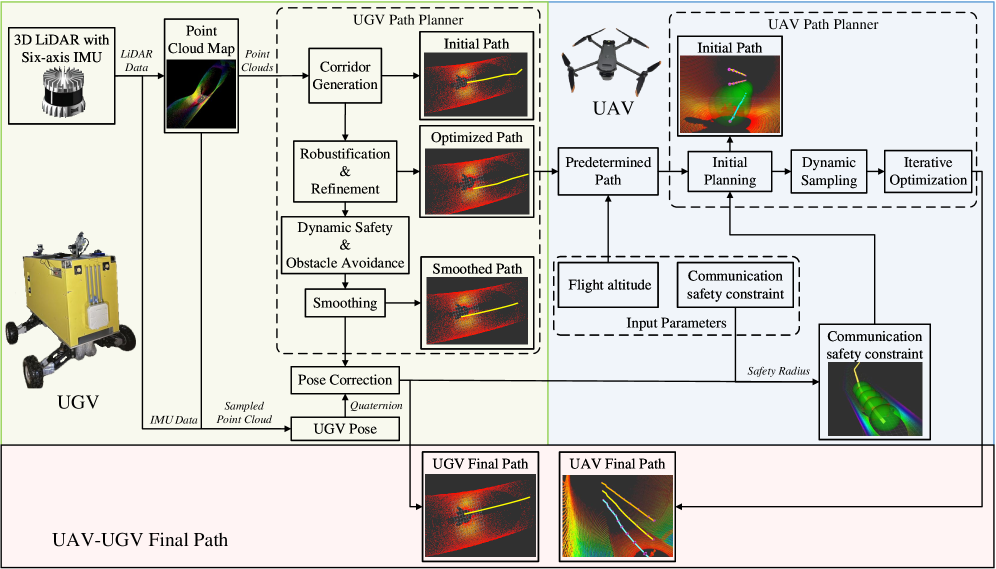
Figure 5 — FLISP 프레임워크 개요
4. Conclusion & Impact (결론 및 시사점)
본 연구는 터널과 같은 고도로 기하학적 제약이 심한 환경에서 실시간 mapless UGV-UAV 협업 탐색을 성공적으로 구현했습니다. FLISP 프레임워크는 계산 복잡도가 높은 Global Map 없이도 정확한 궤적 생성이 가능함을 보였으며, 이는 향후 장거리 인프라 유지보수를 위한 로보틱스 시스템 구축에 핵심적인 아키텍처를 제공합니다. 또한, 공개된 오픈소스 코드는 해당 분야 연구자들에게 중요한 벤치마킹 도구가 될 것으로 기대됩니다.
⚠️ 알림: 이 리뷰는 AI로 작성되었습니다.
관련 포스트
- [논문리뷰] LLMs4All: A Review on Large Language Models for Research and Applications in Academic Disciplines
- [논문리뷰] Xiaomi-GUI-0 Technical Report
- [논문리뷰] Unlocking the Visual Record of Materials Science: A Large-Scale Multimodal Dataset from Scientific Literature
- [논문리뷰] TerraDiT-Ω: Unified Spatial Control for Satellite Image Synthesis with Any Geospatial Primitive
- [논문리뷰] SkillHone: A Harness for Continual Agent Skill Evolution Through Persistent Decision History
Review 의 다른글
- 이전글 [논문리뷰] Interleaved Speech Language Models Latently Work In Text
- 현재글 : [논문리뷰] Large-Scale Tunnel Air-Ground Collaboration With FLISP: Fast LiDAR-IMU Synchronized Path Planner
- 다음글 [논문리뷰] Learning Transferable Dynamics Priors from Action to World Modeling
댓글