[논문리뷰] UniT: Toward a Unified Physical Language for Human-to-Humanoid Policy Learning and World Modeling
링크: 논문 PDF로 바로 열기
메타데이터
저자: Boyu Chen, Yi Chen, Lu Qiu, Jerry Bai, Yuying Ge, Yixiao Ge
1. Key Terms & Definitions (핵심 용어 및 정의)
- UniT: 본 논문에서 제안하는 Unified Latent Action Tokenizer의 약어로, 시각적 정보를 앵커(anchor)로 활용하여 인간과 휴머노이드의 이질적인 동작을 공통의 이산적 잠재 공간(shared discrete latent space)으로 투영하는 프레임워크입니다.
- Visual Anchoring: 서로 다른 키네마틱스(kinematics)를 가진 인간과 휴머노이드가 공유하는 시각적 결과물(visual consequences)을 기준으로 삼아 동작 정보를 정렬하는 핵심 메커니즘입니다.
- Cross-Reconstruction: 시각적 특징이 동작을 재구성하고, 동작 특징이 시각적 전환을 재구성하도록 강제하여 모달리티 간의 강력한 정렬을 유도하는 학습 기법입니다.
- VLA-UniT: UniT 토크나이저를 Vision-Language-Action 아키텍처에 통합하여, 휴머노이드의 정책 학습(policy learning) 및 제로샷(zero-shot) 태스크 전이를 수행하는 프레임워크입니다.
- WM-UniT: UniT 토큰을 범용적인 제어 조건(universal control conditioning)으로 사용하여 액션 조건부 비디오 생성(action-conditioned video generation) 및 동역학 전이를 수행하는 월드 모델링 프레임워크입니다.
2. Motivation & Problem Statement (연구 배경 및 문제 정의)
본 논문은 휴머노이드 파운데이션 모델 학습의 핵심 병목 현상인 고품질 로봇 데이터 부족 문제를 해결하고자 합니다. 기존 연구들은 대규모 인간 데이터의 확장성을 활용하려 시도했으나, 인간과 로봇 간의 운동학적 구조 차이(kinematic mismatches)로 인해 데이터 전이에 큰 어려움을 겪고 있습니다. 기존의 모션 리타게팅(motion retargeting) 기법은 복잡하고 확장성이 떨어지며, 단순 액션 기반 기법은 구현이 물리적으로 일관되지 않거나 도메인 간의 분포 차이로 인해 실패합니다. 따라서 본 연구는 이질적인 동작 데이터를 정렬된 공통 잠재 공간으로 변환할 수 있는 범용적인 '물리적 언어(physical language)'를 구축하고자 합니다 [Figure 1].
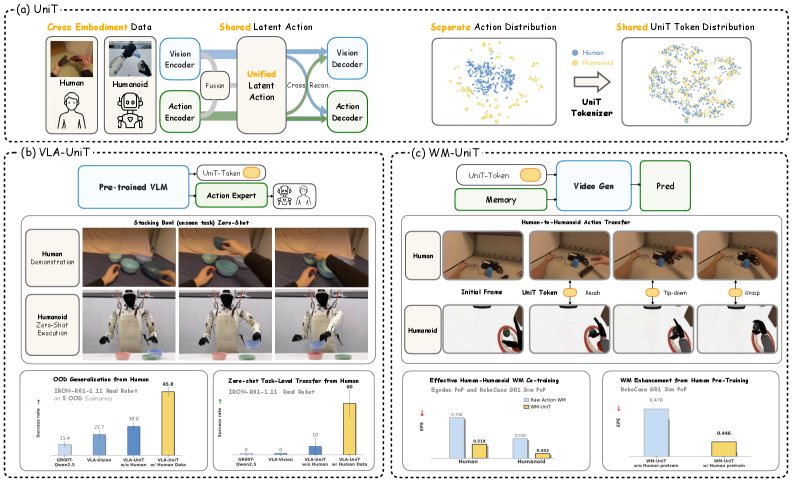
Figure 1 — UniT 프레임워크 개요
3. Method & Key Results (제안 방법론 및 핵심 결과)
본 논문은 시각적 앵커링을 통해 이질적인 동작들을 공통 잠재 공간으로 정렬하는 UniT를 제안합니다. UniT는 시각적, 동작적, 융합적 세 가지 브랜치로 구성된 트리 브랜치(tri-branch) 아키텍처를 가지며, 모든 브랜치는 Residual Quantization(RQ-VAE)을 통해 공유 코드북(shared codebook)으로 양자화됩니다 [Figure 3]. 모델은 교차 재구성(cross-reconstruction) 기법을 사용하여, 서로 다른 키네마틱스를 가진 데이터가 동일한 물리적 의도를 생성할 때 잠재 공간에서 가깝게 배치되도록 합니다. 정량적 실험 결과, VLA-UniT는 RoboCasa GR1 벤치마크에서 기존 최고 성능 모델인 FLARE 대비 11.7% 향상된 66.7%의 성공률을 기록했습니다 [Figure 9]. 특히 인간 데이터를 활용한 co-training 시, Few-Shot 설정에서 로봇 데이터만 사용했을 때 대비 데이터 효율성이 극대화되었으며, 복잡한 OOD(Out-of-Distribution) 제너럴라이제이션 및 제로샷 태스크 전이 성능을 크게 개선했습니다 [Figure 11, Figure 12]. 또한 WM-UniT는 이질적인 도메인 간의 동작 전이 시에도 EPE(End-Point Error)를 유의미하게 낮추어, 더 정밀한 물리 동역학 제어 능력을 입증했습니다 [Table 1].
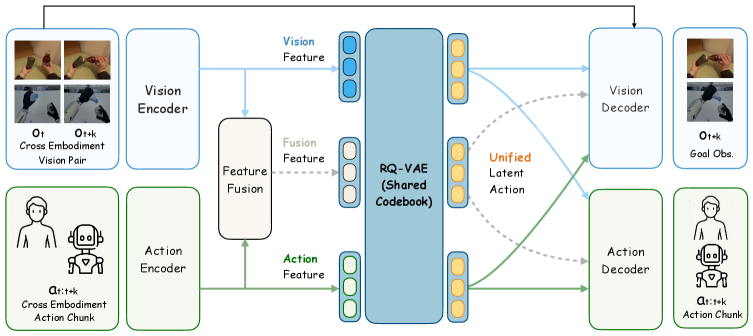
Figure 3 — UniT 아키텍처
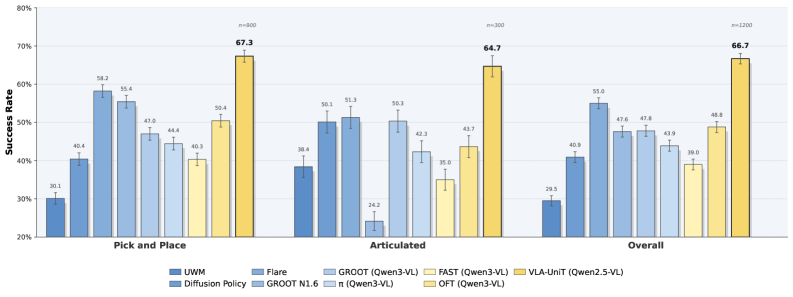
Figure 9 — RoboCasa GR1 성능 비교
4. Conclusion & Impact (결론 및 시사점)
본 논문은 물리적 의도를 시각적으로 정렬된 이산 토큰으로 변환하는 UniT를 통해 휴머노이드 파운데이션 모델의 확장 가능한 학습 경로를 제시합니다. 본 연구는 정책 학습과 월드 모델링이라는 두 가지 핵심 embodied-AI paradigms를 통합함으로써, 이질적인 인간 데이터로부터 휴머노이드로의 효과적인 동작 및 동역학 전이를 실현했습니다. 향후 본 연구의 접근 방식은 인터넷상의 방대한 비정제 영상 데이터를 통해 휴머노이드의 정교한 상체 제어 및 dexterous한 조작 능력을 확장하는 데 크게 기여할 것으로 기대됩니다.
⚠️ 알림: 이 리뷰는 AI로 작성되었습니다.
관련 포스트
- [논문리뷰] Conservative Offline Robot Policy Learning via Posterior-Transition Reweighting
- [논문리뷰] EgoHumanoid: Unlocking In-the-Wild Loco-Manipulation with Robot-Free Egocentric Demonstration
- [논문리뷰] Next Forcing: Causal World Modeling with Multi-Chunk Prediction
- [논문리뷰] Robots Need More than VLA and World Models
- [논문리뷰] World-Language-Action Model for Unified World Modeling, Language Reasoning, and Action Synthesis
Review 의 다른글
- 이전글 [논문리뷰] UniGenDet: A Unified Generative-Discriminative Framework for Co-Evolutionary Image Generation and Generated Image Detection
- 현재글 : [논문리뷰] UniT: Toward a Unified Physical Language for Human-to-Humanoid Policy Learning and World Modeling
- 다음글 [논문리뷰] VLAA-GUI: Knowing When to Stop, Recover, and Search, A Modular Framework for GUI Automation
댓글