[논문리뷰] IntentVLA: Short-Horizon Intent Modeling for Aliased Robot Manipulation
링크: 논문 PDF로 바로 열기
메타데이터
저자: Shijie Lian, Bin Yu, Xiaopeng Lin, Zhaolong Shen, Laurence Tianruo Yang, Yurun Jin, Haishan Liu, Changti Wu, Hang Yuan, Cong Huang, Kai Chen
## 1. Key Terms & Definitions (핵심 용어 및 정의)
- VLA (Vision-Language-Action) Models: 시각적 관측과 언어 명령을 직접 입력받아 로봇의 제어 명령(Action)을 생성하는 심층 학습 기반 정책 모델입니다.
- Short-Horizon Intent: 로봇의 긴 작업 과정 중 특정 시점에서 수행해야 할 즉각적인 로컬 작업 단계나 경로에 대한 의도를 지칭합니다.
- Observation Aliasing: 서로 다른 작업 단계나 의도가 동일하거나 매우 유사한 시각적 관측(Observation)으로 나타나는 현상을 의미합니다.
- Chunked Action Generation: 단일 프레임이 아닌 다수의 행동 단계(Action Chunk)를 한꺼번에 생성하여 제어의 연속성을 확보하는 방식입니다.
- ICC-L2 (Inter-chunk Consistency Error): 연속적인 재계획(Replanning) 단계에서 생성된 액션 청크 간의 불일치를 정량화한 지표로, 낮은 값일수록 행동의 안정성이 높음을 뜻합니다.
## 2. Motivation & Problem Statement (연구 배경 및 문제 정의) 본 논문은 프레임 단위로만 조건을 부여하는 기존 VLA 모델들이 부분 관측성(Partial Observability) 하에서 발생하는 짧은 기간의 의도 모호성 문제를 해결하지 못한다는 점을 지적합니다. 데모 데이터는 에피소드 전체적으로는 다중 모드(Multimodal) 특성을 띠지만, 특정 에피소드 내에서는 로컬 의도가 명확히 고정되어 있습니다. 그러나 프레임 기반 모델은 현재 관측값과 언어 명령만으로 액션을 생성하기 때문에, 이전에 선택된 의도와 무관하게 매 재계획 시마다 다른 의도를 샘플링할 위험이 있습니다. 이러한 현상은 액션 청크 간의 충돌과 실행 불안정을 초래하며, 저자들은 이를 해결하기 위해 최근 시각 이력을 활용하는 IntentVLA를 제안합니다 [Figure 1].
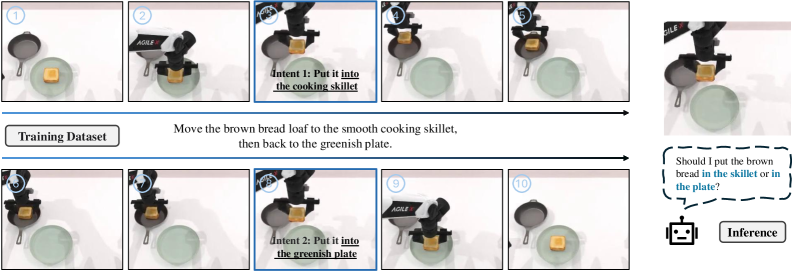
Figure 1 — 의도 모호성 예시
## 3. Method & Key Results (제안 방법론 및 핵심 결과) 본 논문은 최근 시각 관측치를 인코딩하여 짧은 기간의 의도 표현(Short-Horizon Intent Representation)을 생성하고, 이를 액션 생성 조건으로 활용하는 IntentVLA 프레임워크를 제안합니다 [Figure 4]. 저자들은 Qwen3-VL 기반의 비전-언어 백본과 VGGT-1B 기반의 동결된 이력 인코더를 결합하여, 시각적 이력과 현재의 맥락을 게이트된 교차 주의(Gated Cross-Attention) 메커니즘으로 융합합니다. 또한, 짧은 기간의 의도 모호성을 측정하기 위한 12개 작업의 벤치마크인 AliasBench를 구축하였습니다 [Figure 2]. 실험 결과, IntentVLA는 AliasBench에서 기존 베이스라인 대비 평균 성공률을 9.0%에서 45.8%로 대폭 향상시켰습니다 [Table 1]. 또한, ICC-L2 지표를 통해 분석한 결과, 제안 모델은 액션 청크 간의 불일치를 기존 대비 17.6% 감소시켜 더 안정적인 로봇 제어 성능을 입증하였습니다 [Figure 5].
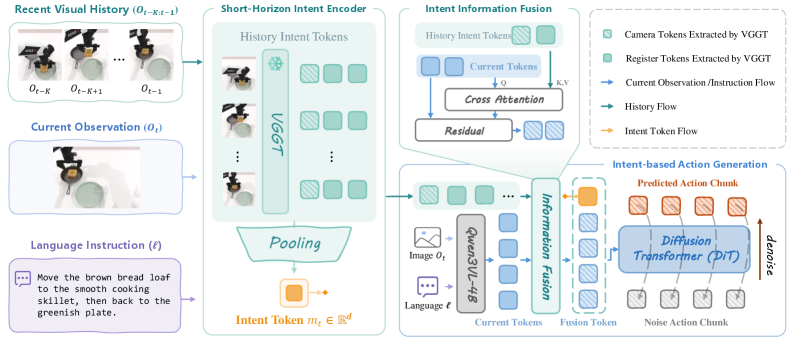
Figure 4 — IntentVLA 아키텍처
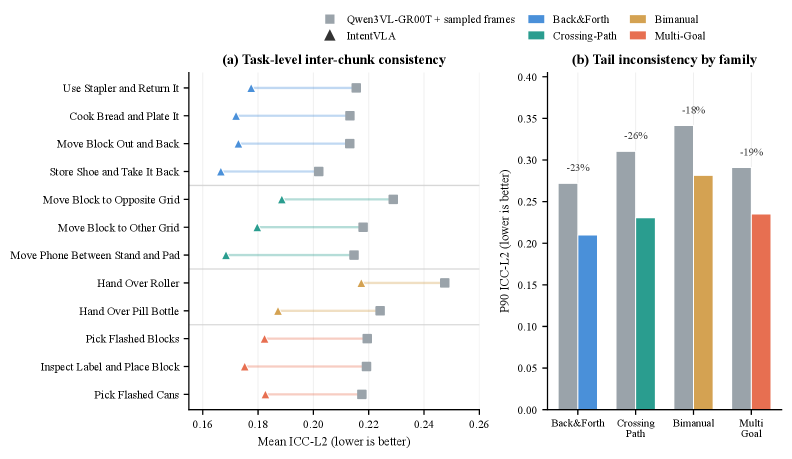
Figure 5 — 액션 일관성 결과
## 4. Conclusion & Impact (결론 및 시사점) 본 논문은 로봇의 작업 시 발생하는 의도 모호성 문제를 성공적으로 정의하고, 시각적 과거 이력을 활용한 의도 모델링을 통해 제어 안정성을 확보하는 실용적인 접근 방식을 제시하였습니다. 제안된 IntentVLA는 표준 벤치마크인 SimplerEnv, LIBERO, RoboCasa 등에서 우수한 일반화 성능과 성공률을 기록하였습니다. 이 연구는 단순히 다중 모드 데모를 학습하는 것을 넘어, 에피소드 내의 로컬 의도를 보존하는 것이 정밀한 로봇 조작에 핵심임을 시사합니다. 향후 연구에서는 더 장기적인 기억 구조나 명시적인 의도 추론 모듈을 결합하여 더욱 고도화된 물리적 지능을 구축할 것으로 기대됩니다.
⚠️ 알림: 이 리뷰는 AI로 작성되었습니다.
관련 포스트
- [논문리뷰] FrameSkip: Learning from Fewer but More Informative Frames in VLA Training
- [논문리뷰] Xiaomi-Robotics-0: An Open-Sourced Vision-Language-Action Model with Real-Time Execution
- [논문리뷰] VideoVLA: Video Generators Can Be Generalizable Robot Manipulators
- [논문리뷰] From Spatial to Actions: Grounding Vision-Language-Action Model in Spatial Foundation Priors
- [논문리뷰] Do You Need Proprioceptive States in Visuomotor Policies?
Review 의 다른글
- 이전글 [논문리뷰] Ideology Prediction of German Political Texts
- 현재글 : [논문리뷰] IntentVLA: Short-Horizon Intent Modeling for Aliased Robot Manipulation
- 다음글 [논문리뷰] LLM-based Detection of Manipulative Political Narratives
댓글