[논문리뷰] SpaceDG: Benchmarking Spatial Intelligence under Visual Degradation
링크: 논문 PDF로 바로 열기
저자: Xiaolong Zhou, Yifei Liu, Ziyang Gong, Jiarui Li, Qiyue Zhao, Muyao Niu, Yuanyuan Gao, Le Ma, Xue Yang, Hongjie Zhang, Zhihang Zhong
## 1. Key Terms & Definitions (핵심 용어 및 정의)
- SpaceDG: 물리적으로 기반을 둔 데이터 엔진을 통해 생성된, 9가지 시각적 퇴화(Visual Degradation)를 포함하는 대규모 공간 이해 데이터셋.
- SpaceDG-Bench: 11개의 추론 카테고리와 9가지 퇴화 유형으로 구성된 인간 검증(Human-verified) 벤치마크.
- 3DGS (3D Gaussian Splatting): 실시간 렌더링 및 장면 재구성을 위해 본 논문에서 공간적 ground truth를 보존하며 퇴화 처리를 적용하는 핵심 3D 표현 기법.
- Degradation-aware SFT: 퇴화된 환경에 대한 강건성(Robustness)을 높이기 위해, 물리적 퇴화 데이터로 모델을 지도 미세 조정(Supervised Fine-tuning)하는 방법론.
## 2. Motivation & Problem Statement (연구 배경 및 문제 정의) 본 연구는 기존 MLLM의 공간 지능 벤치마크가 대부분 깨끗하고 이상적인 환경(Pristine visual inputs)만을 가정하여, 실제 환경에서 발생하는 다양한 시각적 퇴화를 간과하고 있다는 문제를 해결한다. [Figure 1] 기존 모델들은 모션 블러, 저조도, 악천후, 렌즈 왜곡 등 현실적인 물리적 제약 조건 하에서 공간 추론 능력이 현저히 저하되는 구조적 한계를 보인다. 저자들은 이러한 완벽한 관측 가정이 실제 Embodied 및 자율 시스템 배포 환경의 요구사항을 반영하지 못한다고 지적하며, 현실적인 시각적 퇴화 상황에서 모델의 강건성을 평가하고 강화하기 위한 체계적인 벤치마크와 데이터셋이 필요함을 강조한다.
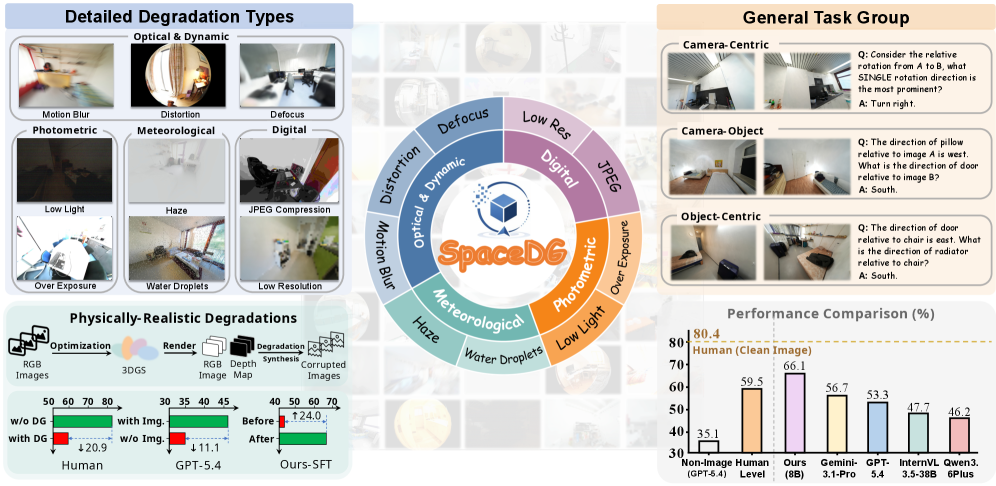
Figure 1 — SpaceDG 전체 개요
## 3. Method & Key Results (제안 방법론 및 핵심 결과) 저자들은 3DGS를 기반으로 기하학적 구조를 보존하면서도 9가지의 물리적으로 현실적인 퇴화 시뮬레이션(광학/동적, 기상, 광도측정, 디지털 퇴화 등)을 적용하는 대규모 데이터 엔진을 개발하였다 [Figure 3]. 이를 통해 약 1M 개의 QA 쌍을 생성하고, 1,102개의 고품질 문항으로 구성된 SpaceDG-Bench를 구축하여 25개의 MLLM을 평가하였다 [Table 1]. 실험 결과, 모든 evaluated MLLM 모델은 시각적 퇴화 상황에서 일관되게 공간 추론 성능이 하락하는 것으로 나타났으며, 특히 미세한 객체 단위의 인지(Object-level perception)가 전역적인 기하학적 추론보다 더 큰 타격을 입는 것이 확인되었다 [Table 2]. 정량적으로, 제안된 Degradation-aware SFT를 적용한 모델은 미세 조정 전 대비 퇴화 환경에서 성능이 크게 향상되었으며, 일부 경우 인간의 성능 상한선에 근접하거나 능가하는 수준의 강건성을 달성하였다 [Table 2]. 특히, 이러한 Degradation-aware SFT는 일반적인 벤치마크에서의 성능 저하 없이 시각적 강건성을 효과적으로 확보할 수 있음을 입증하였다. [Figure 6]
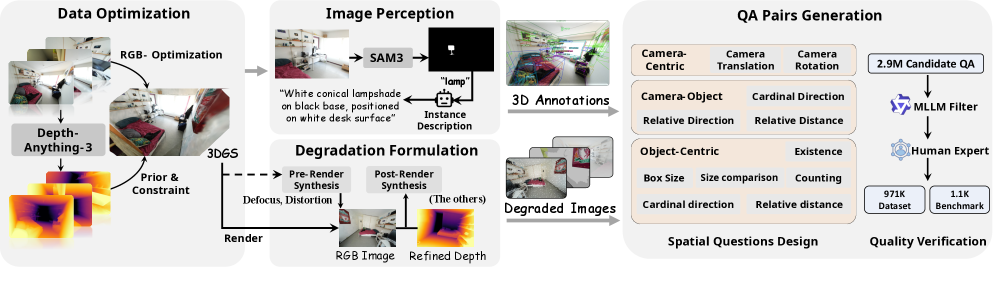
Figure 3 — SpaceDG 데이터 엔진 파이프라인
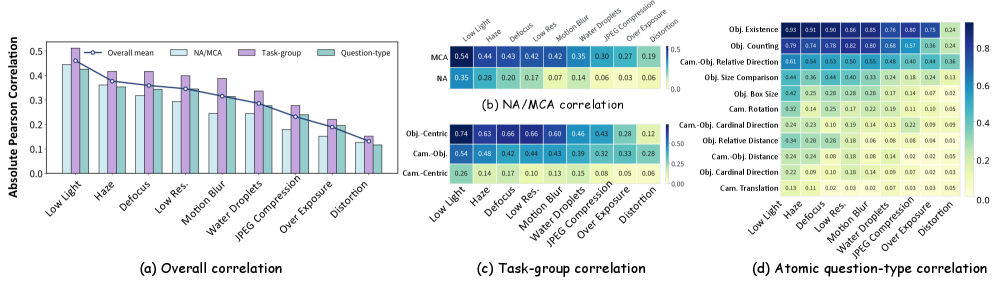
Figure 6 — 퇴화 민감도 상관관계 분석
## 4. Conclusion & Impact (결론 및 시사점) 본 논문은 시각적 퇴화 환경에서의 MLLM 공간 지능 강건성 문제를 최초로 체계화하고 대규모 벤치마크를 제공했다는 점에서 학계 및 산업계에 중요한 기여를 한다. 연구 결과는 현실 환경의 불완전한 시각 데이터를 처리하기 위해 공간 지능 모델의 교육 방식이 어떻게 변화해야 하는지에 대한 명확한 경로를 제시한다. 이번 연구를 통해 Embodied Agent와 자율 시스템이 가혹한 시각적 조건에서도 신뢰성 있게 작동할 수 있는 기반이 마련되었으며, 향후 Degradation-aware Training이 robust MLLM 개발의 핵심적인 프레임워크가 될 것으로 기대된다.
⚠️ 알림: 이 리뷰는 AI로 작성되었습니다.
관련 포스트
- [논문리뷰] WildCity: A Real-World City-Scale Testbed for Rendering, Simulation, and Spatial Intelligence
- [논문리뷰] Artifact-Bench: Evaluating MLLMs on Detecting and Assessing the Artifacts of AI-Generated Videos
- [논문리뷰] OpenSpatial: A Principled Data Engine for Empowering Spatial Intelligence
- [논문리뷰] Robust-R1: Degradation-Aware Reasoning for Robust Visual Understanding
- [논문리뷰] Hearing to Translate: The Effectiveness of Speech Modality Integration into LLMs
Review 의 다른글
- 이전글 [논문리뷰] Sensor2Sensor: Cross-Embodiment Sensor Conversion for Autonomous Driving
- 현재글 : [논문리뷰] SpaceDG: Benchmarking Spatial Intelligence under Visual Degradation
- 다음글 [논문리뷰] Spreadsheet-RL: Advancing Large Language Model Agents on Realistic Spreadsheet Tasks via Reinforcement Learning
댓글