[논문리뷰] GE-Sim 2.0: A Roadmap Towards Comprehensive Closed-loop Video World Simulators for Robotic Manipulation
링크: 논문 PDF로 바로 열기
메타데이터
저자: Boxiang Qiu, Liliang Chen, Yue Liao, et al.
1. Key Terms & Definitions (핵심 용어 및 정의)
- GE-Sim 2.0: 로봇 조작(Robotic Manipulation)을 위해 고안된 closed-loop 비디오 세계 시뮬레이터로, Action-Conditioned Video Generation을 기반으로 시각적 생성과 상태 예측을 통합함.
- Proprioceptive State Expert: 비디오 latent로부터 로봇의 관절 각도 및 그리퍼 상태를 복구하는 경량화된 모델로, downstream 정책 모델에 필요한 상태 정보를 공급함.
- World Judge: VLM(Vision-Language Model) 기반의 보상 모델로, 생성된 롤아웃을 실시간으로 평가하여 작업 성공 여부를 machine-verifiable한 수치로 제공함.
- Action-Conditioned Video Generation: 언어 명령 대신 저수준 로봇 행동 궤적(Action Trajectory)을 입력으로 받아 물리적 행동을 시각적으로 묘사하는 생성 방식.
- Closed-Loop Evaluation: 시뮬레이터가 생성한 시각적/상태적 정보를 정책 모델이 실시간으로 피드백 받아 다음 행동을 결정하는 상호작용 평가 환경.
2. Motivation & Problem Statement (연구 배경 및 문제 정의)
본 논문은 현대 로봇 학습에서 정책(Policy) 모델의 복잡도는 증가하는 반면, 이를 안정적으로 평가할 수 있는 시뮬레이션 환경이 병목 현상으로 작용하는 문제를 해결하고자 한다. 기존의 핸드크래프트 시뮬레이터들은 접촉 역학, 변형 가능한 객체, 세밀한 시각적 표현을 모사하는 데 한계가 있으며, 대규모 로봇 데이터에 기반한 실질적인 평가가 어렵다. 저자들은 단순히 시각적인 롤아웃을 생성하는 것을 넘어, 정책 모델이 물리적 환경과 상호작용하며 학습할 수 있는 Closed-loop 환경을 구축하는 것이 필수적이라고 정의한다. 기존 연구들은 시각적 출력만 제공할 뿐 실제 로봇 정책이 필요로 하는 고유의 상태(Proprioceptive State) 정보나 자동화된 보상 평가 기능을 갖추지 못해 정책의 실무적 적용을 제한하고 있다.
3. Method & Key Results (제안 방법론 및 핵심 결과)
본 논문은 기존 Genie Envisioner를 계승하여 대규모 실세계 로봇 데이터를 통해 GE-Sim 2.0을 재학습하고, 시각적 생성, 상태 추정, 보상 판별이라는 세 가지 핵심 모듈을 통합하여 폐쇄 루프를 완성한다. 시각적 모델은 Pose2Image와 카메라 raymap을 활용하여 행동 조건을 공간적으로 명확히 정렬하며, Proprioceptive State Expert가 비디오 특징으로부터 로봇의 관절 상태를 복구함으로써 모델이 실제 로봇과 유사한 피드백을 정책에 제공하게 한다[3.2, 3.3]. 또한 World Judge를 통해 자동화된 성공 판별 및 보상 신호를 생성하고, DMD2 기반의 distillation을 통해 25프레임 롤아웃을 H100 GPU 기준 2.3초 만에 생성하는 고성능 추론을 구현하였다[3.5]. 정량적 결과로서, GE-Sim 2.0은 WorldArena 리더보드에서 2B 파라미터 규모로 SOTA를 달성하였으며, PSNR, FID 등 영상 품질 지표에서 기존 모델들(Ctrl-World 등)을 압도적인 격차로 능가한다[4.1]. 특히 폐쇄 루프 정책 평가에서 real-robot과 1% 이내의 성공률 차이를 보이며, 이를 기반으로 WM-filtered Behavior Cloning을 수행한 결과 real-robot 성능을 평균 15% 이상 향상시키는 성과를 거두었다[4.2, 4.4].
4. Conclusion & Impact (결론 및 시사점)
본 논문은 비디오 생성 모델이 단순한 시각적 예측기를 넘어 실무적인 로봇 정책 학습 및 평가를 위한 Closed-loop 환경으로 진화할 수 있음을 입증하였다. 시각적 시뮬레이션과 상태 예측, 자동 보상 평가의 결합은 로봇 조작 연구에서 수동 평가의 한계를 극복하는 혁신적인 전환점을 제시한다. 본 연구의 성과는 학계의 로봇 시뮬레이션 표준을 높이는 것은 물론, 확장 가능한 정책 학습(Scalable Evaluation) 및 강화학습 플랫폼으로서 실질적인 산업계 적용 가능성을 열어주었다는 점에 큰 의의가 있다.
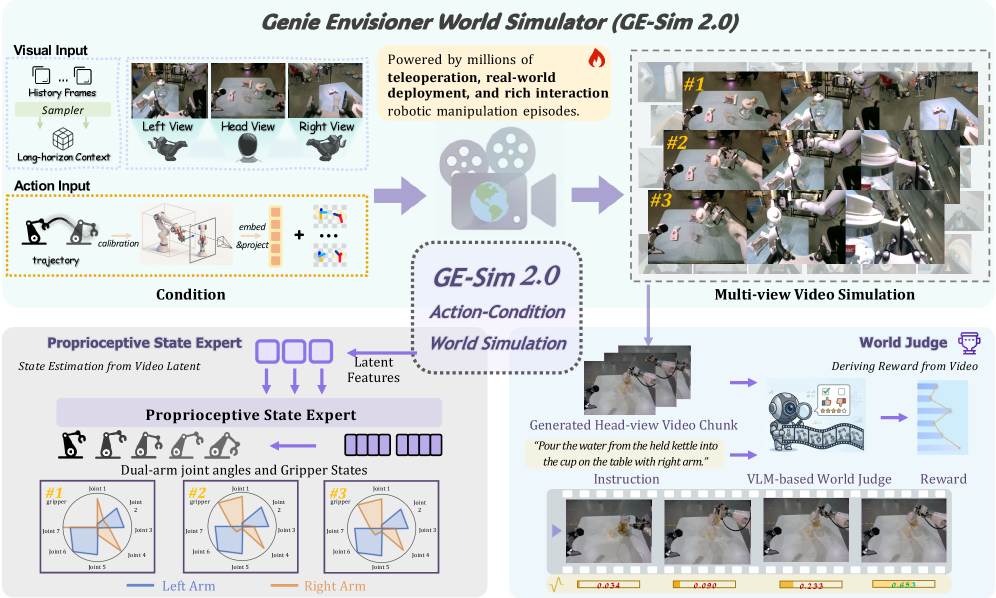
Figure 1 — GE-Sim 2.0 전체 아키텍처 개요
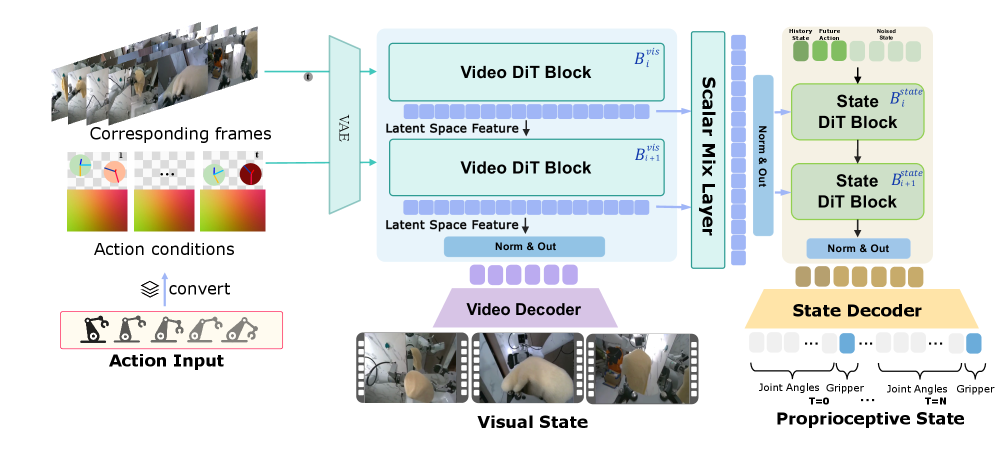
Figure 2 — 비전 및 상태 전문가 모듈
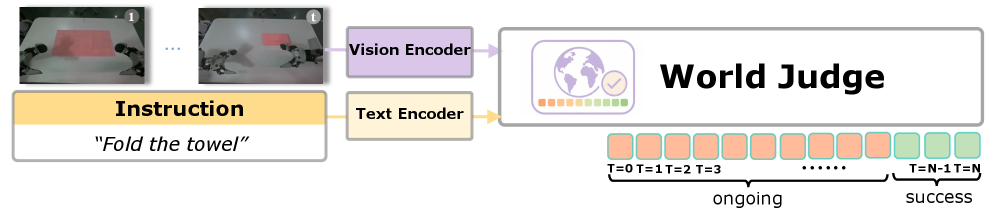
Figure 3 — World Judge 작동 방식
⚠️ 알림: 이 리뷰는 AI로 작성되었습니다.
관련 포스트
- [논문리뷰] UniClawBench: A Universal Benchmark for Proactive Agents on Real-World Tasks
- [논문리뷰] Dual Latent Memory in Vision-Language-Action Models for Robotic Manipulation
- [논문리뷰] RynnWorld-Teleop: An Action-Conditioned World Model for Digital Teleoperation
- [논문리뷰] RynnWorld-4D: 4D Embodied World Models for Robotic Manipulation
- [논문리뷰] From Foundation to Application: Improving VLA Models in Practice
Review 의 다른글
- 이전글 [논문리뷰] From Pixels to Words -- Towards Native One-Vision Models at Scale
- 현재글 : [논문리뷰] GE-Sim 2.0: A Roadmap Towards Comprehensive Closed-loop Video World Simulators for Robotic Manipulation
- 다음글 [논문리뷰] GEM: Generative Supervision Helps Embodied Intelligence
댓글