[논문리뷰] NeuROK: Generative 4D Neural Object Kinematics
링크: 논문 PDF로 바로 열기
저자: Chen Geng, Guangzhao He, Yue Gao, Yunzhi Zhang, Shangzhe Wu, Jiajun Wu
1. Key Terms & Definitions (핵심 용어 및 정의)
- NeuROK (Neural Object Kinematics): 동적 객체의 변형 가능한 상태를 저차원 잠재 공간(Latent Space)에서 파라미터화하는 학습 기반 프레임워크입니다.
- Kinematic State Parameterization: 물리적 시스템의 설정을 완전히 정의하기 위해 사용하는 일반화된 좌표 체계로, 본 논문에서는 데이터로부터 학습된 저차원 매니폴드를 사용합니다.
- Lagrangian Mechanics: 시스템의 운동 에너지와 잠재 에너지를 통해 동역학을 유도하는 물리적 프레임워크로, 학습된 NeuROK 상태 공간 위에서 Euler-Lagrange 방정식을 풀어 동적 궤적을 생성합니다.
- Perceiver-based Architecture: 다양한 수의 포인트 샘플링 입력을 처리하기 위해 고정된 수의 학습 가능한 토큰과 교차 주의(Cross-attention) 메커니즘을 사용하는 변환기 기반 아키텍처입니다.
2. Motivation & Problem Statement (연구 배경 및 문제 정의)
본 논문은 정적 3D 형상으로부터 물리적으로 타당한 4D 동적 궤적을 생성하는 범용적인 프레임워크의 부재 문제를 해결합니다. 기존 연구들은 특정 객체 범주에 최적화된 물리 모델이나 명시적인 물리 파라미터 식별에 의존하여 확장성이 낮고 범용성이 떨어진다는 한계가 있습니다. 저자들은 데이터로부터 저차원 동역학을 학습함으로써 범주별 유도 편향(Inductive Bias) 없이도 객체의 변형을 일반화할 수 있는 새로운 접근 방식을 제안합니다 [Figure 2].
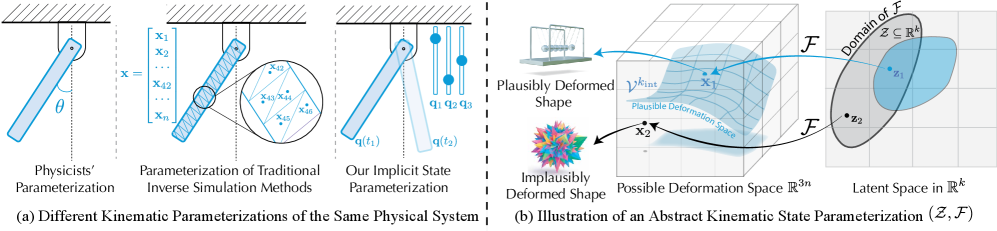
Figure 2 — 기존 방식과 제안하는 NeuROK 비교
3. Method & Key Results (제안 방법론 및 핵심 결과)
본 논문은 Transformer 기반의 인코더-디코더 모델을 통해 입력된 정적 메쉬에서 해당 객체의 변형 가능한 상태를 정의하는 NeuROK 잠재 공간을 학습합니다. 학습된 모델은 임의의 잠재 벡터를 plausibly deformed 된 3D 메쉬로 매핑하며, 이를 통해 고차원 메쉬 공간이 아닌 저차원 잠재 공간에서 Lagrangian 동역학을 직접 시뮬레이션합니다 [Figure 3]. 이 과정은 명시적인 물리 주석 없이 오직 4D 기하학적 궤적 데이터만으로 학습됩니다. 정량적 결과에서 NeuROK는 역운동학(Inverse Kinematics) 태스크에서 기존 방법론 대비 Chamfer distance를 크게 개선하였으며, IoU 지표에서도 0.764를 기록하여 기존 최상위 모델인 KeyPointDeformer(0.570) 대비 월등한 성능을 보였습니다 [Table 1]. 또한, 물리적 시뮬레이션 태스크에서도 105명의 사용자를 대상으로 한 선호도 조사에서 81.43%라는 압도적인 선택을 받으며 시각적 사실성과 물리적 타당성을 동시에 확보했음을 입증했습니다 [Table 2].
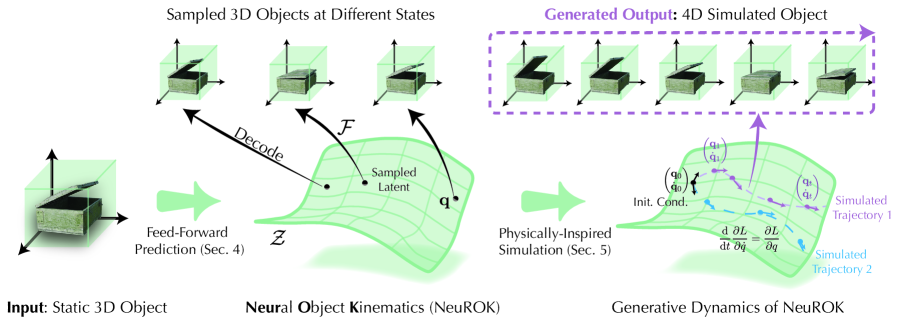
Figure 3 — 전체 시스템 아키텍처 및 파이프라인
4. Conclusion & Impact (결론 및 시사점)
본 논문은 물리적 원리와 학습된 잠재 공간을 결합한 NeuROK를 통해 정적 3D 형상으로부터 범용적인 4D 동적 생성 시뮬레이션을 가능하게 했습니다. 이 프레임워크는 특정 카테고리에 구속되지 않는 강력한 일반화 성능을 제공하여 Embodied AI 및 로보틱스 분야에서 3D 세계 모델 구축을 위한 핵심 기술로 활용될 것으로 기대됩니다. 향후 연구는 더 복잡한 환경 내 상호작용과 다양한 물질 특성을 결합한 다중 객체 시뮬레이션으로 확장될 수 있습니다.
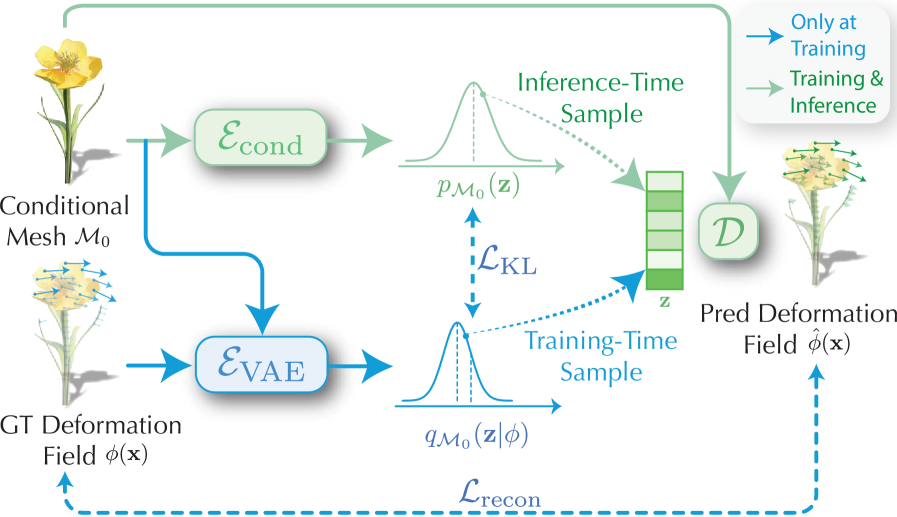
Figure 4 — NeuROK 학습 프레임워크
⚠️ 알림: 이 리뷰는 AI로 작성되었습니다.
관련 포스트
- [논문리뷰] What Matters for Diffusion-Friendly Latent Manifold? Prior-Aligned Autoencoders for Latent Diffusion
- [논문리뷰] LLMs4All: A Review on Large Language Models for Research and Applications in Academic Disciplines
- [논문리뷰] xHC: Expanded Hyper-Connections
- [논문리뷰] Xiaomi-Robotics-1: Scaling Vision-Language-Action Models with over 100K Hours of Real-World Trajectories
- [논문리뷰] When Does Muon Help Agentic Reinforcement Learning?
Review 의 다른글
- 이전글 [논문리뷰] Native Audio-Visual Alignment for Generation
- 현재글 : [논문리뷰] NeuROK: Generative 4D Neural Object Kinematics
- 다음글 [논문리뷰] ORACLE: Anticipating Scams from Partial Trajectories in Streaming App Usage
댓글