[논문리뷰] LIMMT: Less is More for Motion Tracking
링크: 논문 PDF로 바로 열기
메타데이터
저자: Yu Guan, Zekun Qi, Chenghuai Lin, Xuchuan Chen, Dairu Liu, Wenyao Zhang, Jilong Wang, Xinqiang Yu, He Wang, Li Yi
1. Key Terms & Definitions (핵심 용어 및 정의)
- GQS (General Quality Selection): 물리적 타당성, 다양성, 복잡성이라는 세 가지 차원을 기준으로 모션 데이터를 필터링하고 선택하는 3단계 데이터 정제 프레임워크입니다.
- Physics Feasibility Filter: 시뮬레이터 환경에서 강체 물리 엔진을 활용해 지면 관통, 공중 부양, 관절 속도 제한 위반 등 물리적 결함이 있는 모션 클립을 제거하는 단계입니다.
- Periodic Autoencoder (PAE): 모션을 진폭(Amplitude), 주파수(Frequency), 위상(Phase) 등의 동적 매개변수로 분해하여, 시간 축에 불변하는 의미론적 임베딩을 학습하는 네트워크입니다.
- Global Weighted FPS (Farthest Point Sampling): 모션 임베딩 공간에서 기하학적 다양성과 동적 복잡성 점수를 결합하여, 가장 정보량이 많은 모션 샘플을 효율적으로 추출하는 알고리즘입니다.
2. Motivation & Problem Statement (연구 배경 및 문제 정의)
본 논문은 휴머노이드 모션 트래킹 학습에서 무분별한 데이터 확장(Data Scaling)이 오히려 성능 저하를 초래한다는 문제점을 지적합니다. 기존의 대규모 모션 데이터셋은 인턴넷 환경에서 수집되어 지면 관통, 관절 제한 위반 등 물리적 아티팩트(Artifact)를 다수 포함하고 있으며, 이는 학습 과정에서 보상 해킹(Reward Hacking)이나 수렴 실패를 유발합니다. 저자들은 데이터의 양보다 "데이터의 품질이 최적화 궤적(Optimization Trajectory)을 결정한다"는 핵심 통찰을 제시하며, 물리적으로 타당하고 다양성이 확보된 고품질 데이터 선별의 필요성을 강조합니다. [Figure 1]
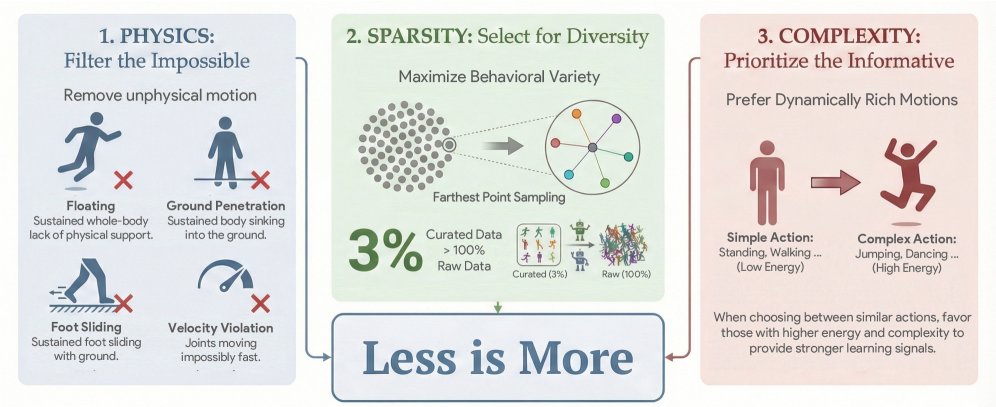
Figure 1 — GQS 데이터 정제 파이프라인
3. Method & Key Results (제안 방법론 및 핵심 결과)
본 연구는 GQS 프레임워크를 통해 물리 필터링, 의미론적 임베딩 학습, 복잡성 가중치가 적용된 샘플링을 순차적으로 수행합니다. 먼저 시뮬레이터 기반의 물리적 검증을 통해 타당하지 않은 모션을 걸러내고, Periodic Autoencoder를 사용하여 모션의 구조적 특징을 보존하는 저차원 임베딩을 생성합니다. 최종적으로 선택된 샘플링 단계에서는 기하학적 거리에 모션의 복잡성(운동 에너지 및 가속도)을 가중치로 결합하여, 단순히 다양한 모션을 넘어 학습에 실질적인 도움이 되는 동적인 모션을 우선 선별합니다 [Figure 1]. 실험 결과, 전체 AMASS 데이터셋의 3%만 사용하여 학습한 모델이 전체 데이터를 사용한 베이스라인보다 우수한 성능을 보였습니다 [Figure 2]. 정량적으로는 Any2Track 및 TWIST2 아키텍처에서 기존 대비 Success Rate가 각각 유의미하게 향상되었으며, MPJPE 지표에서도 5~15%의 성능 개선을 달성했습니다 [Table 1].
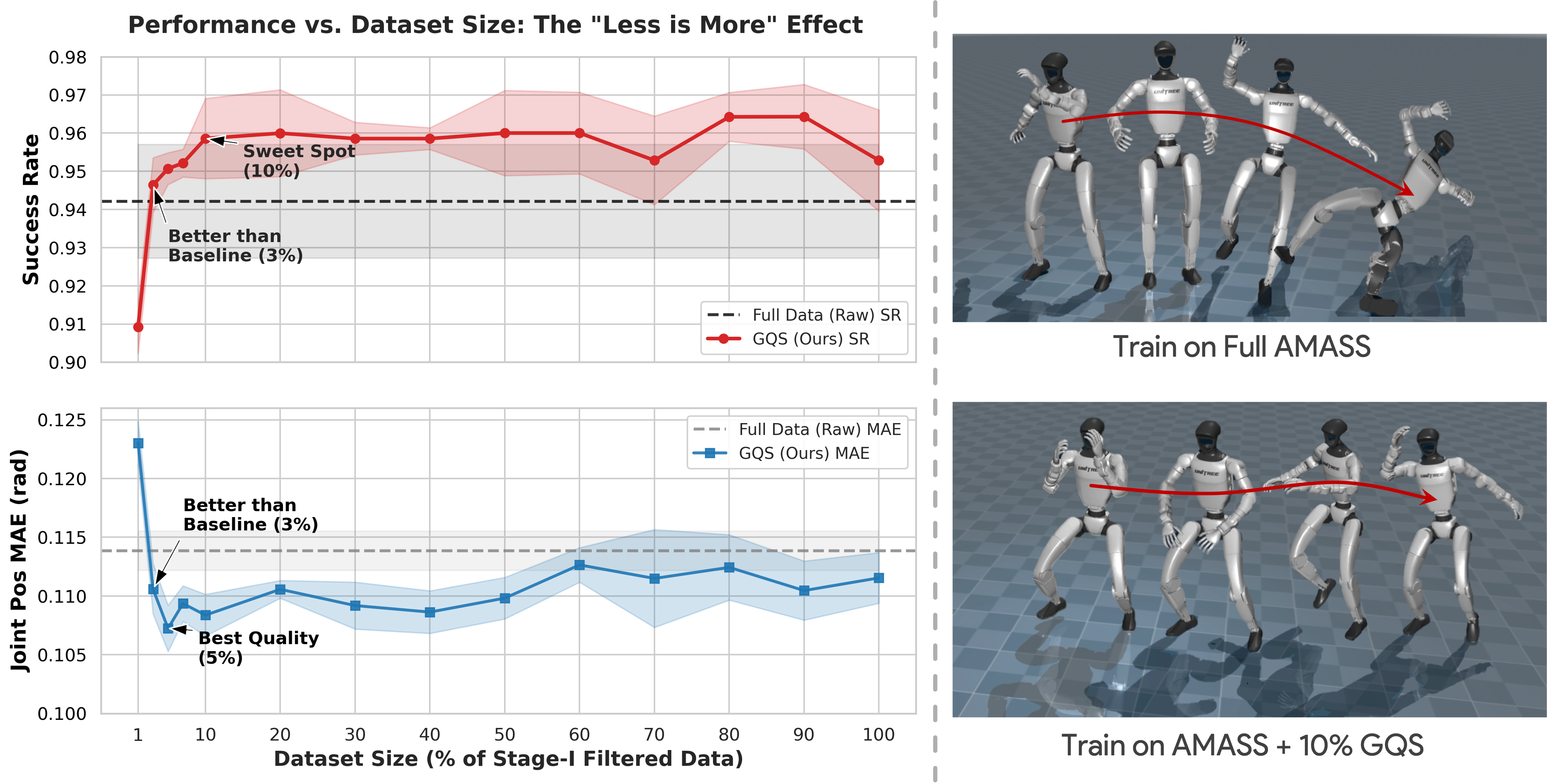
Figure 2 — 데이터 비율별 성공률 비교
4. Conclusion & Impact (결론 및 시사점)
본 논문은 모션 트래킹 분야에서 데이터의 '양'보다 '질'이 중요하다는 Less-is-More 패러다임을 확립하였습니다. 제안된 GQS는 물리적 타당성, 다양성, 복잡성을 정량화하여 딥러닝 모델의 효율적인 학습을 가능케 했으며, 다양한 트래커와 데이터셋에 즉시 적용 가능한 Plug-and-Play 특성을 입증했습니다. 이 연구는 고가의 데이터 수집 및 학습 비용을 획기적으로 절감할 수 있는 새로운 데이터 중심의 모션 학습 청사진을 제시하여 휴머노이드 로봇 학습 분야의 발전에 기여합니다.
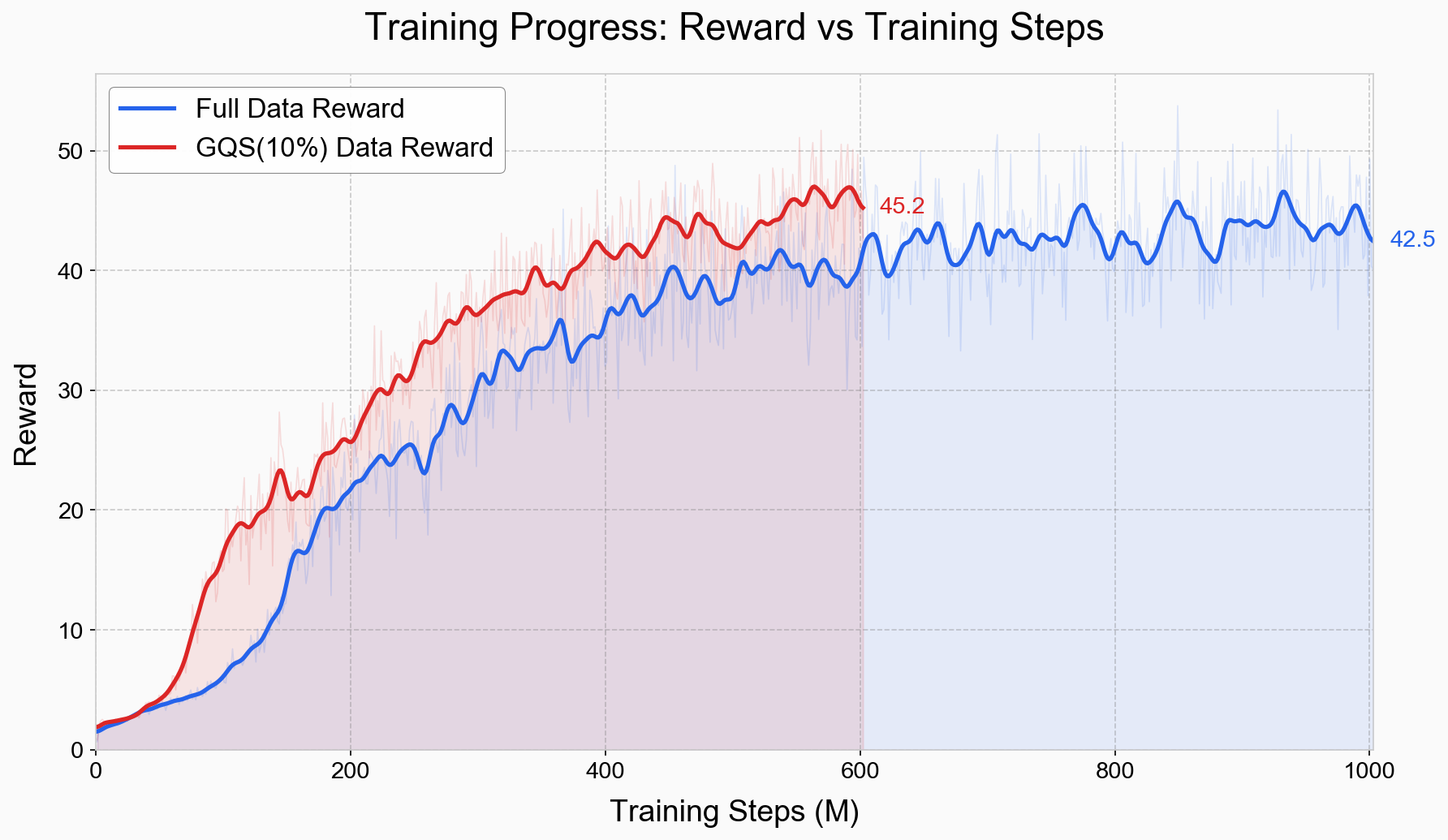
Figure 3 — 데이터셋에 따른 학습 곡선
⚠️ 알림: 이 리뷰는 AI로 작성되었습니다.
관련 포스트
- [논문리뷰] Is Position Bias in Dense Retrievers Built In-or Learned from Data?
- [논문리뷰] DexJoCo: A Benchmark and Toolkit for Task-Oriented Dexterous Manipulation on MuJoCo
- [논문리뷰] Learning to Communicate Locally for Large-Scale Multi-Agent Pathfinding
- [논문리뷰] IntentVLA: Short-Horizon Intent Modeling for Aliased Robot Manipulation
- [논문리뷰] Revisiting DAgger in the Era of LLM-Agents
Review 의 다른글
- 이전글 [논문리뷰] How Far Can Chord-Symbol Time-Series Adaptation Carry Genre Identity? Capabilities and Boundaries in Multi-Genre Chord-Symbol Modeling
- 현재글 : [논문리뷰] LIMMT: Less is More for Motion Tracking
- 다음글 [논문리뷰] LLM Explainability with Counterfactual Chains and Causal Graphs
댓글