[논문리뷰] UniSHARP: Universal Sharp Monocular View Synthesis
링크: 논문 PDF로 바로 열기
메타데이터
저자: Meixi Song, Dizhe Zhang, Hao Ren, Ruiyang Zhang, Bo Du, Ming-Hsuan Yang, Lu Qi
1. Key Terms & Definitions (핵심 용어 및 정의)
- UniSHARP: 단일 이미지로부터 perspective, wide-FoV, fisheye, panoramic 등 다양한 카메라 모델을 지원하는 범용 monocular novel view synthesis 프레임워크.
- Ray-Based Universal Representation: 카메라 투영 모델에 종속되지 않는 일관된 3D 공간 구성을 위해, 픽셀 좌표 대신 unit ray와 radial distance를 기반으로 Gaussian primitives를 배치하는 표현 방식.
- Geometry Anchored Gaussians: 레이 그리드(ray grid) 상에 배치된 초기 Gaussian primitives로, 카메라 타입과 관계없이 3D 공간을 일관되게 초기화하는 역할을 수행함.
- Feature Conditioned Gaussian Residuals: 2D 의미론적 특징과 3D 공간 특징을 결합하여 Gaussian의 최종 속성(offset, scale, color 등)을 정교하게 예측하는 보정 계층.
2. Motivation & Problem Statement (연구 배경 및 문제 정의)
기존의 monocular novel view synthesis 연구(예: SHARP, Flash3D)는 주로 pinhole 카메라 기반의 perspective 이미지에 최적화되어 있어, 시야각이 넓거나 왜곡이 큰 wide-FoV, fisheye, panoramic 카메라 환경으로의 일반화가 어렵습니다 [Figure 1]. 이러한 기존 방식들은 고정된 이미지 평면 좌표계를 사용하므로 투영 모델이 다른 카메라에 적용할 경우 심각한 기하학적 오류가 발생합니다. 본 연구는 단일 이미지로부터 카메라 타입에 구애받지 않고 3D 구조, 가시성, 외관을 추론할 수 있는 범용적인 모델의 필요성을 해결하고자 합니다.

Figure 1 — 다양한 카메라용 UniSHARP
3. Method & Key Results (제안 방법론 및 핵심 결과)
본 논문은 다양한 카메라 시스템을 통합하기 위해 기하학적 정렬을 이미지 평면이 아닌 범용적인 Ray-Based Universal Representation 공간에서 수행하는 UniSHARP를 제안합니다 [Figure 2]. 저자들은 Gaussian primitives를 ray와 radial distance 공간에 배치하여 입력 해상도와 관계없이 공간적 일관성을 유지하도록 설계하였습니다 [Figure 2]. 또한, Geometry Anchored Gaussians로 기본 기하 구조를 형성하고, Feature Conditioned Gaussian Residuals를 통해 2D/3D 특징을 융합하여 세밀한 복원을 수행합니다. 다양한 FoV를 포괄하는 벤치마크를 구축하여 실험한 결과, UniSHARP는 perspective 데이터셋뿐만 아니라 OmniRooms 등 파노라마 데이터셋에서 기존 방법론들을 압도적인 수치로 능가하였습니다 [Table 3]. 정량적 지표인 PSNR, SSIM, LPIPS 전 영역에서 우수한 성능을 입증하였으며, 시각적으로도 훨씬 더 선명하고 왜곡이 적은 고품질의 novel view를 생성함을 확인하였습니다 [Figure 3], [Figure 4].
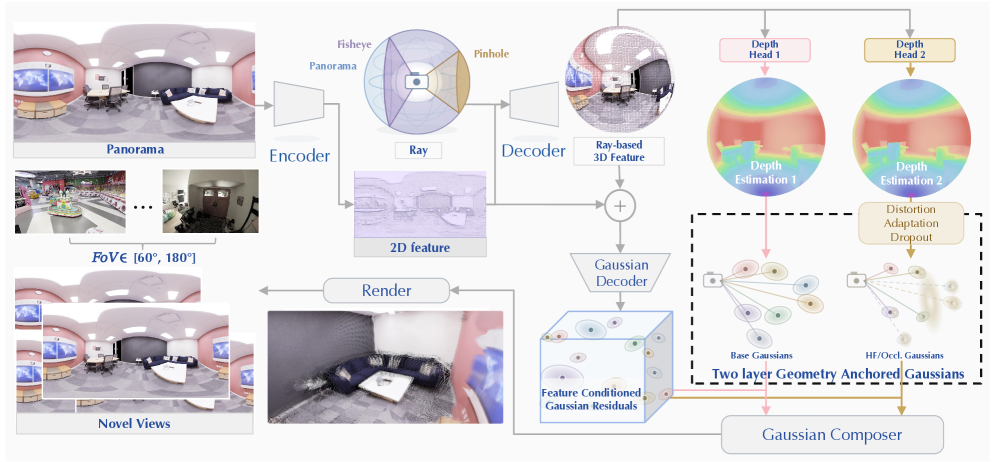
Figure 2 — UniSHARP 파이프라인
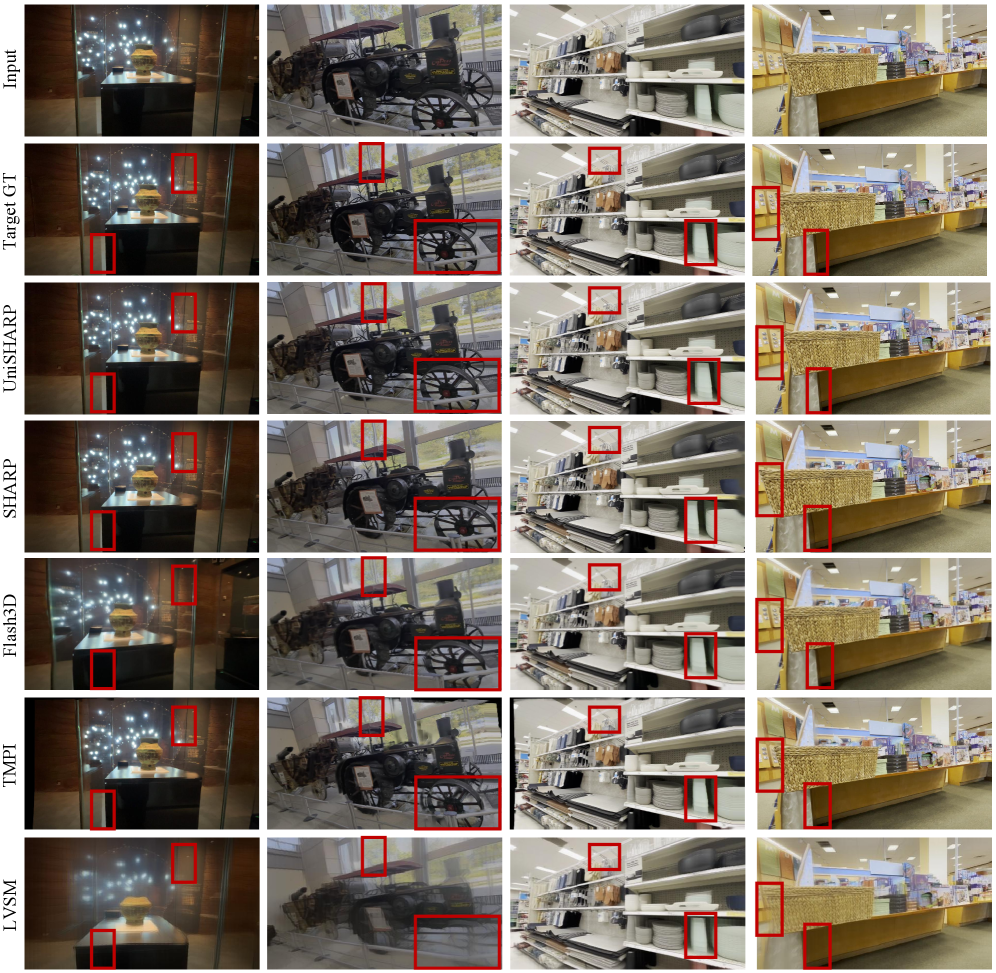
Figure 3 — Perspective 시각적 비교
4. Conclusion & Impact (결론 및 시사점)
본 논문은 다양한 카메라 환경에서 작동하는 범용적 monocular novel view synthesis 프레임워크인 UniSHARP를 성공적으로 제시하였습니다. 레이 기반의 통합 표현과 혼합 카메라 학습 전략을 통해 카메라 특수성을 제거함으로써 기존 모델의 한계를 극복했습니다. 이 연구는 로봇 공학, AR/VR, 몰입형 텔레프레즌스 등 다양한 공간 인지 응용 분야에서 입력 데이터의 제약 없이 고품질 3D 재구성을 가능하게 하는 중요한 토대가 될 것으로 기대됩니다.
⚠️ 알림: 이 리뷰는 AI로 작성되었습니다.
관련 포스트
- [논문리뷰] ZipSplat: Fewer Gaussians, Better Splats
- [논문리뷰] Less Gaussians, Texture More: 4K Feed-Forward Textured Splatting
- [논문리뷰] F4Splat: Feed-Forward Predictive Densification for Feed-Forward 3D Gaussian Splatting
- [논문리뷰] MeshSplatting: Differentiable Rendering with Opaque Meshes
- [논문리뷰] Multi-view Pyramid Transformer: Look Coarser to See Broader
Review 의 다른글
- 이전글 [논문리뷰] Towards Retrieving Interaction Spaces for Agentic Search
- 현재글 : [논문리뷰] UniSHARP: Universal Sharp Monocular View Synthesis
- 다음글 [논문리뷰] Watch, Remember, Reason: Human-View Video Understanding with MLLMs
댓글