[논문리뷰] EventVLA: Event-Driven Visual Evidence Memory for Long-Horizon Vision-Language-Action Policies
링크: 논문 PDF로 바로 열기
메타데이터
저자: Ganlin Yang, Zhangzheng Tu, Yuqiang Yang, et al.
1. Key Terms & Definitions (핵심 용어 및 정의)
- VLA (Vision-Language-Action Policy): 시각 정보와 언어 지시를 입력받아 로봇의 동작을 결정하는 end-to-end 모델을 의미합니다.
- KEM (Keyframe Evidence Memory): 미래의 실행 horizon 내에서 작업에 결정적인 순간(keyframe)을 예측하여 저장하는 동적 메모리 모듈입니다.
- Foundational Visual Anchors: 초기 작업 환경 정보(initial frame)와 짧은 구간의 시각적 히스토리를 유지하여 기본적인 장면 정보를 제공하는 고정된 메모리 기법입니다.
- Non-Markovian Task: 작업 수행 중 일시적으로 시각적 정보가 차단되거나 사라져, 과거의 특정 시점 정보를 보존해야 성공할 수 있는 복합적 작업입니다.
- RoboTwin-MeM: 로봇의 중간 상태 보존 능력을 체계적으로 평가하기 위해 설계된 진단용 벤치마크 데이터셋입니다.
2. Motivation & Problem Statement (연구 배경 및 문제 정의)
본 논문은 기존의 VLA 모델이 엄격한 Markovian 가정 하에 작동하여 장기 작업(long-horizon) 중 발생하는 시각 정보의 차단이나 일시적 변화를 적절히 처리하지 못하는 문제를 해결합니다. 기존의 메모리 보완 방식들은 정보의 병목 현상을 겪거나, 두 개의 시스템을 결합하여 발생하는 높은 latency, 혹은 무분별한 버퍼 축적으로 인한 데이터 중복 문제에 시달리고 있습니다 [Figure 1]. 저자들은 작업에 필수적인 시각적 증거(visual evidence)를 언제, 어떻게 보존해야 하는지가 핵심적인 과제라고 정의하며, 이를 위해 sparse한 핵심 정보만을 효율적으로 선택하고 보관하는 새로운 프레임워크가 필요함을 강조합니다.
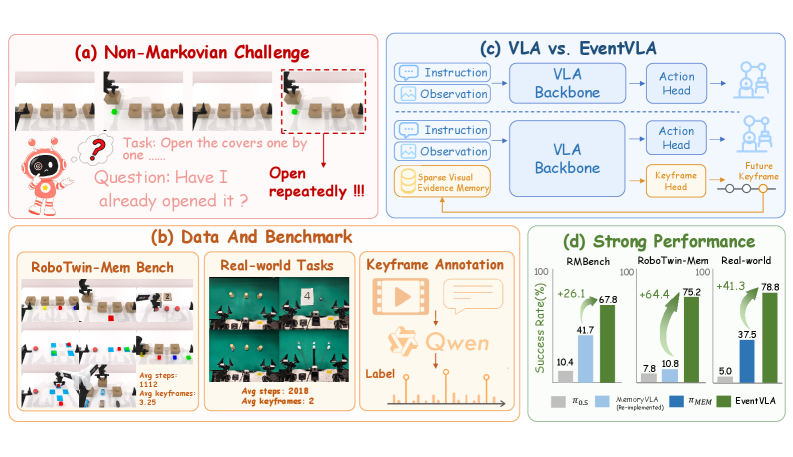
Figure 1 — EventVLA 개요 및 비마르코프 도전과제
3. Method & Key Results (제안 방법론 및 핵심 결과)
본 논문은 foundational visual anchors와 동적인 KEM 모듈을 결합한 EventVLA 프레임워크를 제안합니다 [Figure 2]. KEM 모듈은 VLA 모델의 hidden state를 활용하여 미래의 작업 horizon에 걸쳐 어떤 시점이 작업 성공에 결정적인 keyframe인지를 예측하고, 이를 메모리에 능동적으로 기록합니다. 이 과정에서 NMS (Non-Maximum Suppression)를 활용한 사후 처리와 temporal cooldown을 적용하여 불필요한 데이터 중복을 방지하고 메모리 효율을 극대화합니다. 정량적 평가 결과, EventVLA는 기존의 최첨단 메모리 보완 기법 대비 RoboTwin-MeM 벤치마크에서 약 75.2%의 성공률을 기록하여 독보적인 성능 우위를 입증했습니다 [Table 2]. 특히, 실세계의 bimanual 로봇 작업에서도 reactive 베이스라인인 $\pi_{0.5}$ 모델이 실패한 복잡한 시나리오에서 최대 80~90%의 성공률을 달성하며 강력한 non-Markovian 대응 능력을 보였습니다 [Figure 4].
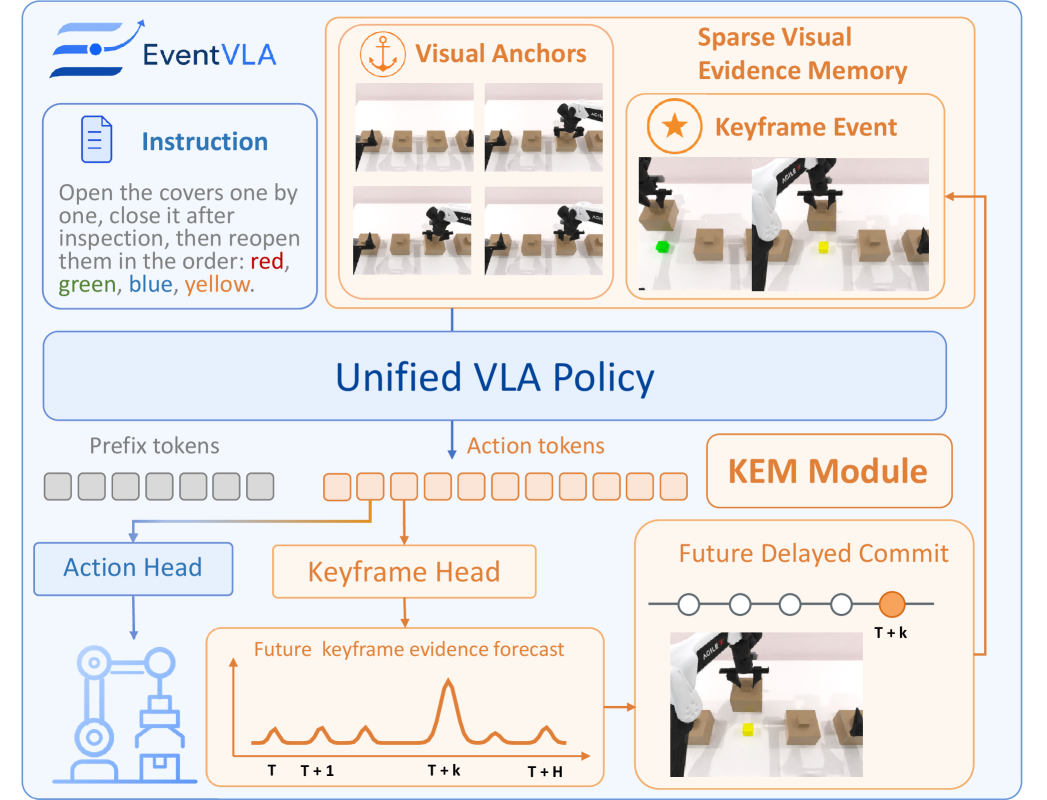
Figure 2 — EventVLA의 전체 프레임워크 구조
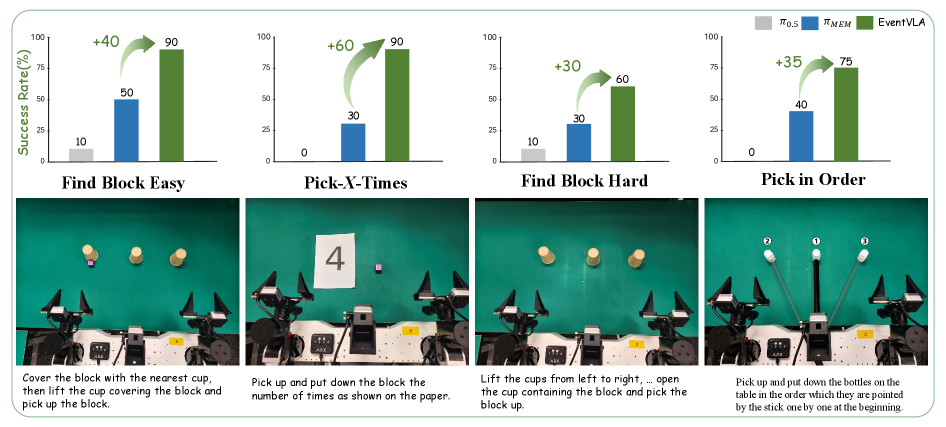
Figure 4 — 실세계 로봇 실험 결과
4. Conclusion & Impact (결론 및 시사점)
본 연구는 EventVLA를 통해 sparse한 시각적 증거 메모리가 장기 로봇 조작 작업에서 비마르코프적(non-Markovian) 난제를 해결하는 핵심 열쇠임을 입증하였습니다. KEM 기반의 foresight-driven 메모리 기법은 기존 버퍼 방식의 중복성을 제거하고 실시간성(real-time performance)과 정확도를 동시에 확보하였습니다. 본 연구가 제시한 RoboTwin-MeM 벤치마크와 프레임워크는 향후 범용 로봇 정책이 더 복잡하고 장기적인 조작 태스크를 수행하는 데 필요한 메모리 아키텍처 연구의 중요한 이정표가 될 것입니다.
⚠️ 알림: 이 리뷰는 AI로 작성되었습니다.
관련 포스트
- [논문리뷰] Overcoming Dynamics-Blindness: Training-Free Pace-and-Path Correction for VLA Models
- [논문리뷰] Cortex 2.0: Grounding World Models in Real-World Industrial Deployment
- [논문리뷰] SCALE: Self-uncertainty Conditioned Adaptive Looking and Execution for Vision-Language-Action Models
- [논문리뷰] Mixture of Horizons in Action Chunking
- [논문리뷰] VLA-4D: Embedding 4D Awareness into Vision-Language-Action Models for SpatioTemporally Coherent Robotic Manipulation
Review 의 다른글
- 이전글 [논문리뷰] Escaping the Self-Confirmation Trap: An Execute-Distill-Verify Paradigm for Agentic Experience Learning
- 현재글 : [논문리뷰] EventVLA: Event-Driven Visual Evidence Memory for Long-Horizon Vision-Language-Action Policies
- 다음글 [논문리뷰] FLAT: Feedforward Latent Triangle Splatting for Geometrically Accurate Scene Generation
댓글