[논문리뷰] NoPA: Non-Parametric Online 3D Scene Graph Generation
링크: 논문 PDF로 바로 열기
메타데이터
저자: Qi Xun Yeo, Seungjun Lee, Yan Li, Gim Hee Lee
1. Key Terms & Definitions (핵심 용어 및 정의)
- 3D SSG (3D Semantic Scene Graph): 3D 환경 내의 객체(노드)와 객체 간의 관계(엣지)를 구조화하여 표현하는 데이터 모델로, 로봇의 실내 탐색 및 조작에 활용됩니다.
- Particle Set: 객체의 기하학적 형태를 표현하기 위해 고정된 개수의 3D 점들을 샘플링하여 구성한 비모수적(Non-parametric) 표현 방식입니다.
- MMD (Maximum Mean Discrepancy): 두 분포(객체 후보 간의 파티클 셋)가 얼마나 유사한지를 특징 공간 내에서 직접 측정하는 커널 기반 통계 지표입니다.
- Hellinger Distance: 두 확률 분포(여기서는 가우시안 근사값) 간의 유사도를 측정하는 지표로, 본 논문에서는 1단계 필터링 과정에서 효율적인 후보 선별을 위해 사용됩니다.
- Online Association: 스트리밍되는 RGB-D 데이터를 기반으로 실시간으로 새로운 객체 후보를 기존의 전역 객체 노드와 매칭하거나 새로운 노드로 생성하는 과정입니다.
2. Motivation & Problem Statement (연구 배경 및 문제 정의)
본 논문은 실시간 3D SSG 생성 시 발생하는 계산 효율성과 기하학적 정보 손실 간의 트레이드오프 문제를 해결하고자 합니다. 기존의 SLAM 기반 방식은 높은 계산 비용으로 인해 실시간성이 떨어지는 한계가 있으며, 최근의 가우시안 기반 근사법(FROSS)은 연산 속도는 빠르지만 객체를 타원체(Ellipsoid)로 과도하게 단순화하여 기하학적 세부 정보가 손실된다는 치명적인 단점이 있습니다 [Figure 1]. 이러한 가우시안 가정은 특히 얇거나 평면적인 객체에서 잘못된 머징(Under-merging 또는 Over-merging)을 유발하여 최종 그래프의 구조적 결함으로 이어집니다. 따라서 본 연구는 실시간성을 유지하면서도 객체의 기하학적 디테일을 보존할 수 있는 새로운 접근 방식인 NoPA를 제안합니다.
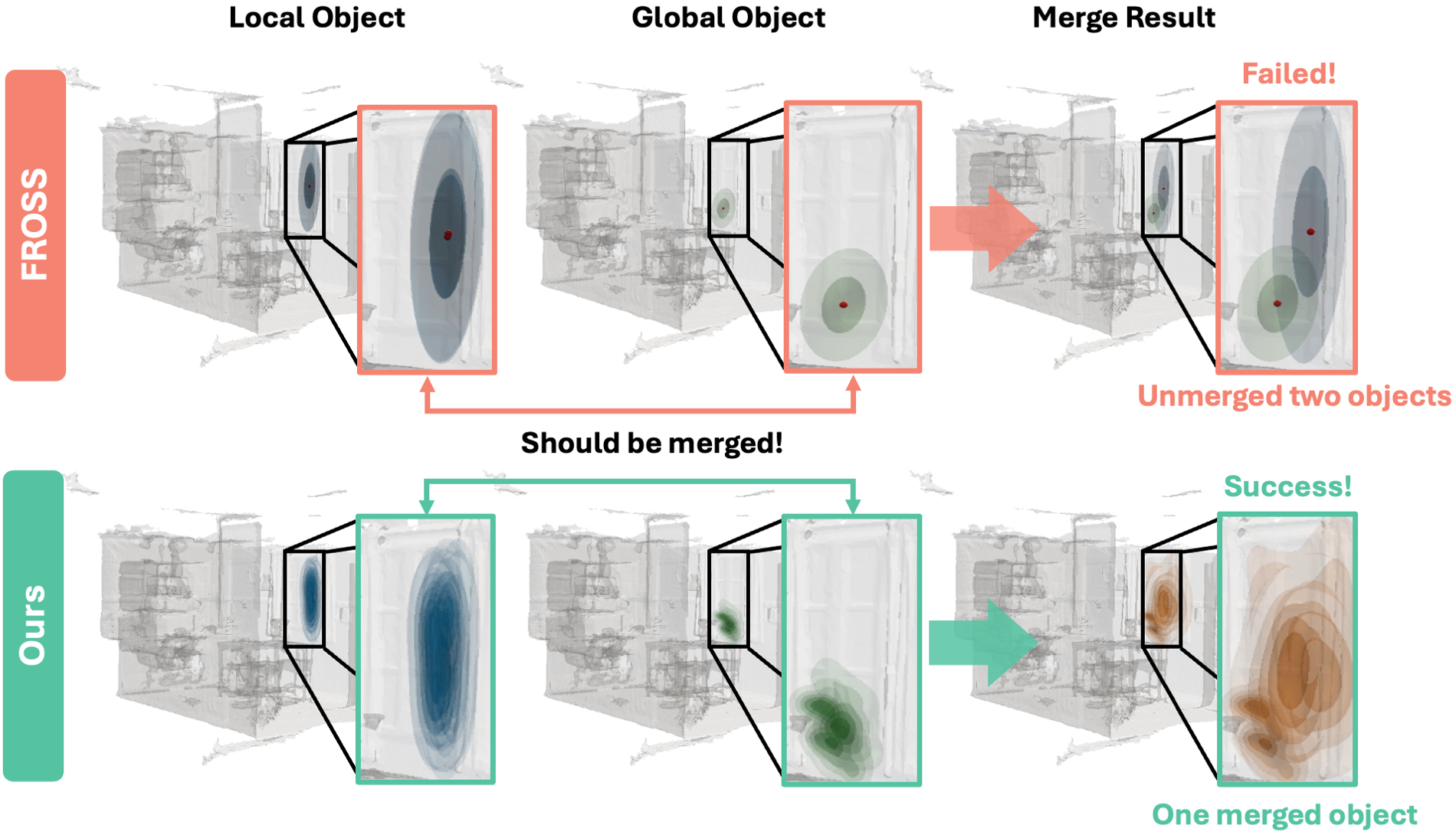
Figure 1 — 가우시안 vs 비모수 표현 비교
3. Method & Key Results (제안 방법론 및 핵심 결과)
본 논문은 각 객체를 고정된 개수의 파티클 셋으로 표현하는 비모수적 프레임워크인 NoPA를 제안합니다 [Figure 2]. 제안 모델은 2D 장면 그래프로부터 파티클 셋을 샘플링하여 객체의 3D 구조를 정교하게 유지하며, 머징 과정에서는 효율을 위해 Hellinger distance 기반의 1단계 사전 필터를 거친 뒤, 불확실한 경우에만 MMD를 사용하여 정밀한 분포 비교를 수행합니다 [Figure 4]. 추가적으로, 유사한 객체들 간의 관계를 전파하는 메커니즘을 도입하여 단일 뷰에서 놓친 엣지 정보를 보완합니다. 실험 결과, NoPA는 3DSSG 및 ReplicaSSG 데이터셋에서 기존 가우시안 기반 방식 대비 높은 Recall 성능을 달성하였습니다 [Table 1, Table 2]. 특히 3DSSG 벤치마크에서 관계 예측(Rel.) Recall 성능을 크게 향상시켰으며, 256개의 파티클 사용 시에도 실시간성을 만족하는 27ms 수준의 낮은 Latency를 유지함을 입증하였습니다 [Table 1].
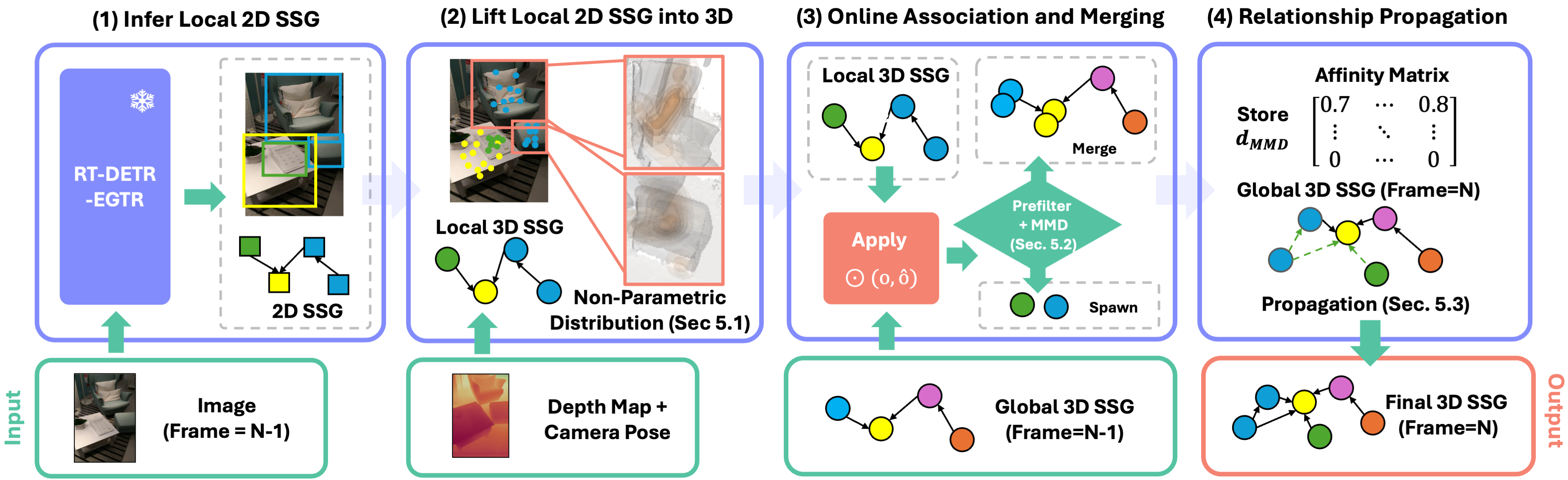
Figure 2 — NoPA 전체 파이프라인
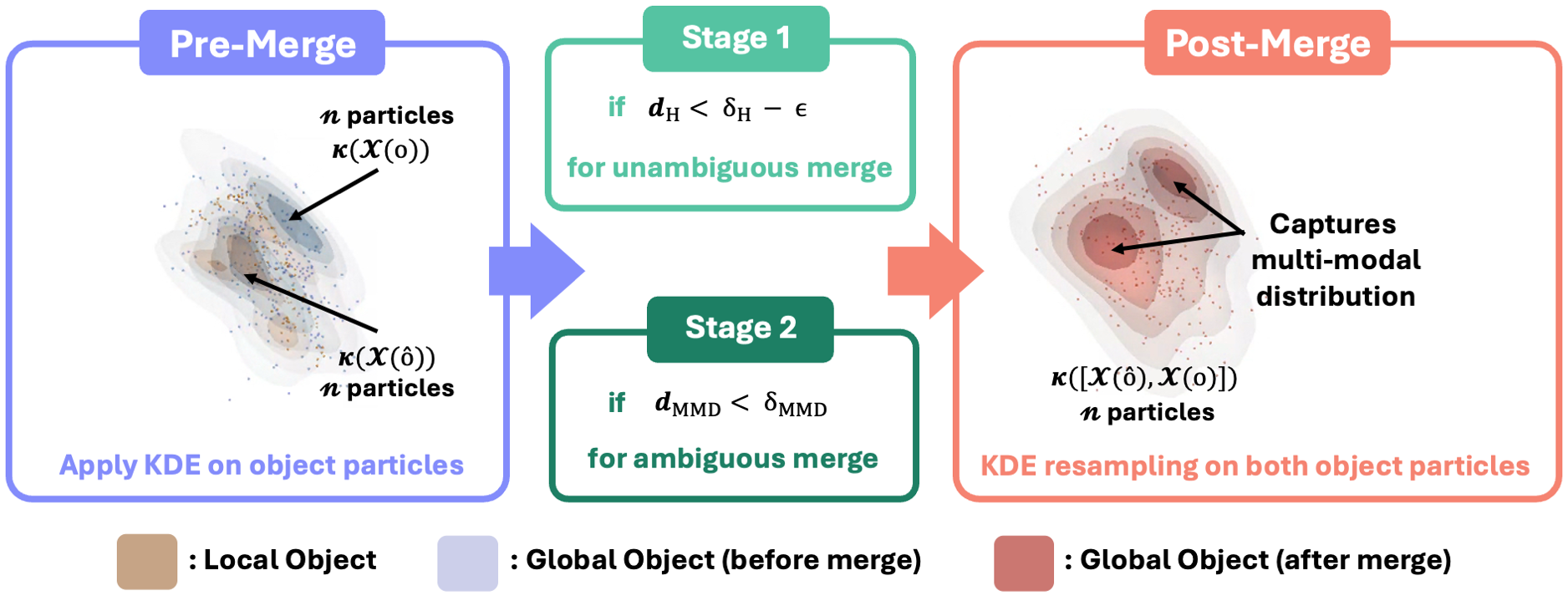
Figure 4 — MMD 기반 머징 과정
4. Conclusion & Impact (결론 및 시사점)
본 논문은 비모수적 파티클 셋과 MMD 기반 머징 전략을 결합한 NoPA를 통해 실시간 3D SSG 생성의 새로운 표준을 제시합니다. 이 접근 방식은 기존의 가우시안 근사법이 가진 기하학적 제약을 효과적으로 극복하면서도 실시간성과 메모리 효율성을 동시에 확보하였습니다. 특히 본 연구에서 제시한 관계 전파 메커니즘은 노이즈가 많은 실제 환경에서 그래프의 구조적 일관성을 강화하는 데 핵심적인 역할을 합니다. 향후 NoPA는 로봇의 자율 주행, 실내 환경 재구성, Embodied AI 등 복잡한 3D 공간 이해가 필요한 분야에서 핵심적인 기술 프레임워크로 활용될 것으로 기대됩니다.
⚠️ 알림: 이 리뷰는 AI로 작성되었습니다.
관련 포스트
- [논문리뷰] DreamForge-World 0.1 Preview: A Low-Compute Real-Time Controllable World Model
- [논문리뷰] Prompt-Level Distillation: A Non-Parametric Alternative to Model Fine-Tuning for Efficient Reasoning
- [논문리뷰] Lip Forcing: Few-Step Autoregressive Diffusion for Real-time Lip Synchronization
- [논문리뷰] SwiftVR: Real-Time One-Step Generative Video Restoration
- [논문리뷰] FRAPPE: Full Input, Residual Output Autoencoding with Projection Pursuit Encoder
Review 의 다른글
- 이전글 [논문리뷰] Multimodal Continuous Reasoning via Asymmetric Mutual Variational Learning
- 현재글 : [논문리뷰] NoPA: Non-Parametric Online 3D Scene Graph Generation
- 다음글 [논문리뷰] Perceive-to-Reason: Decoupling Perception and Reasoning for Fine-Grained Visual Reasoning
댓글