[논문리뷰] The DAWN of World-Action Interactive Models
링크: 논문 PDF로 바로 열기
메타데이터
저자: Hongbo Lu, Liang Yao, Chenghao He, Haoyu Wang, Xiang Gu, Xianfei Li, Wenlong Liao, Tao He, Pai Peng
1. Key Terms & Definitions (핵심 용어 및 정의)
- WAIM (World-Action Interactive Models): 미래의 세계 상태와 에이전트의 행동을 독립적인 단계로 분리하지 않고, 상호 의존적인 결합 변수로 정의하여 추론 과정에서 양방향으로 공동 진화(co-evolve)시키는 모델 프레임워크입니다.
- DAWN (Denoising Actions and World iNteractive model): WAIM 원칙을 자율 주행에 적용한 모델로, World Predictor와 World-Conditioned Action Denoiser 간의 순환적 상호작용을 통해 행동을 생성하는 latent generative model입니다.
- Auto-Encoder Resampler: 고해상도의 dense visual tokens을 Planning에 최적화된 저차원의 compact latent world tokens으로 압축하여 연산 효율성과 정보 보존 사이의 균형을 맞추는 모듈입니다.
- Latent Rollout: 픽셀 공간(pixel-space)에서의 복잡한 렌더링 대신, 압축된 latent 공간에서 미래 상태를 짧게 명시적으로 전개(rollout)하여 Long-horizon trajectory 생성을 지원하는 기법입니다.
2. Motivation & Problem Statement (연구 배경 및 문제 정의)
본 논문은 기존 World Action Models(WAMs)가 세계 예측과 행동 생성을 독립적인 병렬 구조나 고정된 predict-then-plan 파이프라인으로 처리함으로써, 주행 환경의 핵심인 '행동 의존적 미래(action-contingent future)'를 모델링하는 데 한계가 있음을 지적합니다. 특히, 자율 주행에서 안전한 경로를 선택하기 위해서는 특정 행동이 미래 환경을 어떻게 변화시킬지에 대한 상호 교감이 필수적입니다. 저자들은 기존의 decoupling된 구조가 상호작용이 잦은 복잡한 주행 시나리오에서 미래 상태와 의사결정 간의 물리적 개연성을 확보하는 데 부족하다고 판단하고, 이를 해결하기 위한 상호작용 중심의 새로운 프레임워크를 제안합니다 [Figure 1].

Figure 1 — WAM에서 WAIM으로의 발전
3. Method & Key Results (제안 방법론 및 핵심 결과)
본 논문은 DAWN을 통해 세계 모델과 행동 생성기가 추론 과정에서 서로의 가설을 재귀적으로 개선하는 World-Action Interactive 구조를 제안합니다 [Figure 2]. World Predictor는 현재 행동 가설을 조건으로 미래 latent 상태를 예측하며, World-Conditioned Action Denoiser는 예측된 세계 상태를 바탕으로 행동 가설을 구체화하는 과정을 반복합니다. 이러한 재귀적 Interaction은 4단계의 학습 과정을 통해 정교화되며, 최종적으로는 Diffusion Transformer(DiT) 구조를 사용하여 행동을 생성합니다. 실험 결과, DAWN은 NAVSIM v1 벤치마크에서 perception-free 설정으로 89.1의 PDMS를 달성하여 SOTA 성능을 기록했습니다 [Table 1]. 또한, nuScenes 데이터셋에서도 3초 후 예측 기준 0.52m의 L2 error를 기록하며, 기존 방법론 대비 월등한 정확도와 안전성을 입증했습니다 [Table 2]. 추가적으로 Ablation Study를 통해 interactive 업데이트가 수행될 때 PDMS가 85.2에서 87.9로 상승함을 확인하여, 모델 내 구성 요소들의 유기적 결합이 성능 향상의 핵심임을 증명하였습니다 [Table 8].

Figure 2 — DAWN의 전체 아키텍처
4. Conclusion & Impact (결론 및 시사점)
본 논문은 미래 세계 상태와 행동을 분리된 출력이 아닌 결합 변수로 infer하는 WAIM 패러다임을 확립하였습니다. 제안된 DAWN 모델은 명시적인 latent rollout과 재귀적 정제(refinement) 과정을 통해 효율적이면서도 안전한 궤적 생성을 가능하게 합니다. 이 연구는 단순히 미래를 수동적으로 예측하는 것을 넘어, 에이전트의 의도가 미래 환경을 능동적으로 구성하는 interactive한 주행 모델링의 중요성을 시사합니다. 향후 본 연구는 복잡하고 불확실한 환경에서 자율 주행 시스템의 의사결정 신뢰도를 높이는 데 기여할 것으로 기대됩니다.
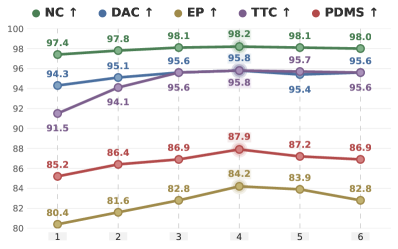
Figure 3 — 상호작용 라운드 효과
⚠️ 알림: 이 리뷰는 AI로 작성되었습니다.
관련 포스트
- [논문리뷰] Learning A Unified Risk Map for Autonomous Driving in Partially Observable Environments
- [논문리뷰] Fast-dDrive: Efficient Block-Diffusion VLM for Autonomous Driving
- [논문리뷰] UniUGP: Unifying Understanding, Generation, and Planing For End-to-end Autonomous Driving
- [논문리뷰] OpenREAD: Reinforced Open-Ended Reasoing for End-to-End Autonomous Driving with LLM-as-Critic
- [논문리뷰] WildCity: A Real-World City-Scale Testbed for Rendering, Simulation, and Spatial Intelligence
Review 의 다른글
- 이전글 [논문리뷰] ShapeCodeBench: A Renewable Benchmark for Perception-to-Program Reconstruction of Synthetic Shape Scenes
- 현재글 : [논문리뷰] The DAWN of World-Action Interactive Models
- 다음글 [논문리뷰] The Extrapolation Cliff in On-Policy Distillation of Near-Deterministic Structured Outputs
댓글