[논문리뷰] DragMesh-2: Physically Plausible Dexterous Hand-Object Interaction with Articulated Objects
링크: 논문 PDF로 바로 열기
메타데이터
저자: Tianshan Zhang, Yijia Duan, Yanjun Li, Zeyu Zhang, Hao Tang
1. Key Terms & Definitions
- DragMesh-2: 관절형 물체와 손의 물리적 접촉을 통해 조작이 이루어지는 contact-driven 프레임워크입니다.
- PICA (Physically Informed Contact-Aware): 물리적 신호를 학습 과정에 주입하여, 별도의 촉각/힘 센서 없이도 변화하는 contact load 환경에서 강건한 조작 정책을 학습하는 메커니즘입니다.
- GAPartNet: 관절형 물체의 기하학적 구조 및 조작 가능성을 정의한 대규모 데이터셋으로, 본 연구의 실험 환경으로 활용되었습니다.
- Action Saturation: 정책이 고관절 부하를 극복하기 위해 제어 신호를 과도하게 사용하여 관절의 한계치에 도달하는 현상으로, 접촉 안정성을 저해합니다.
- Damping Variation: 물체의 관절 운동에 가해지는 저항력을 조절하여 out-of-distribution (OOD) 환경에서의 강건성을 평가하는 핵심 지표입니다.
2. Motivation & Problem Statement
본 연구는 관절형 물체를 조작할 때 발생하는 hand-object interaction (HOI) 의 물리적 안정성 문제를 해결하고자 합니다. 기존 연구들은 주로 고정된 동역학 환경에서 task completion만을 목표로 학습하기 때문에, 접촉 부하가 변하거나 특정 동역학 조건에 과적합(overfit)될 경우 성능이 급격히 저하되는 한계가 있습니다. 특히 촉각이나 힘 피드백이 없는 상황에서는 모델이 nominal dynamics에만 의존하게 되어 실제 물리적 접촉을 유지하지 못하는 경우가 빈번합니다. 이를 해결하기 위해 저자들은 정책 학습 과정에 물리적 정보를 명시적으로 통합하는 새로운 접근 방식을 제안합니다 [Figure 1].
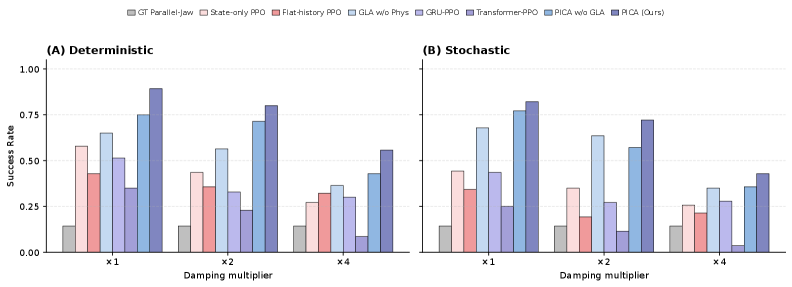
Figure 1 — DragMesh-2 아키텍처
3. Method & Key Results
본 논문은 PICA 학습 메커니즘을 통해 강화학습 에이전트가 접촉 상태를 인식하고 안정적인 조작을 수행하도록 유도합니다. PICA는 보상 함수(reward function)에 contact maintenance, detachment risk, action-boundary regularization 항목을 추가하고, temporal contact-response modeling을 결합하여 동역학 변화에 대응하는 정책을 최적화합니다. 실험 결과, DragMesh-2는 damping condition이 증가하는 OOD 환경에서도 기존 베이스라인 대비 월등한 task success를 달성했습니다. 정량적으로는 strong damping (×4) 환경에서 0.56의 deterministic success를 기록하여, state-only PPO (0.27) 나 Transformer-PPO (0.09) 를 압도하는 성능을 보였습니다 [Figure 2]. 또한, 단순한 학습 반복만으로는 action saturation을 야기하여 성능이 붕괴되는 것을 확인하였으며, PICA가 이러한 한계를 극복하는 데 필수적임을 입증했습니다 [Table 2].
4. Conclusion & Impact
본 논문은 DragMesh-2를 통해 관절형 물체 조작의 물리적 타당성을 확보하고, 접촉 기반 상호작용의 강건성을 획기적으로 개선하였습니다. 이 연구는 촉각 센서 없이도 physically informed 학습을 통해 현실적인 동역학 환경을 반영할 수 있음을 보여주었으며, 향후 humanoid locomotion과 manipulation을 결합한 통합 로봇 제어 분야에 중요한 이정표가 될 것입니다. 또한, 공개된 순수 기하학 기반의 조작 데이터셋은 학계의 후속 연구를 가속화하는 핵심 자산이 될 것으로 기대됩니다.
⚠️ 알림: 이 리뷰는 AI로 작성되었습니다.
관련 포스트
- [논문리뷰] FORT-Searcher: Synthesizing Shortcut-Resistant Search Tasks for Training Deep Search Agents
- [논문리뷰] DeVI: Physics-based Dexterous Human-Object Interaction via Synthetic Video Imitation
- [논문리뷰] RadAgent: A tool-using AI agent for stepwise interpretation of chest computed tomography
- [논문리뷰] CLIPO: Contrastive Learning in Policy Optimization Generalizes RLVR
- [논문리뷰] Multi-Task GRPO: Reliable LLM Reasoning Across Tasks
Review 의 다른글
- 이전글 [논문리뷰] DF3DV-1K: A Large-Scale Dataset and Benchmark for Distractor-Free Novel View Synthesis
- 현재글 : [논문리뷰] DragMesh-2: Physically Plausible Dexterous Hand-Object Interaction with Articulated Objects
- 다음글 [논문리뷰] Duration Aware Scheduling for ASR Serving Under Workload Drift
댓글