[논문리뷰] Translation as a Bridging Action: Transferring Manipulation Skills from Humans to Robots
링크: 논문 PDF로 바로 열기
메타데이터
저자: Sijin Chen, Kaixuan Jiang, Haixin Shi, et al.
1. Key Terms & Definitions (핵심 용어 및 정의)
- Bridging Action: 인간과 로봇이 공유할 수 있는 표준화된 동작 표현으로, 본 논문에서는 헤드 카메라 프레임 기준의 relative wrist translation을 의미함.
- VLA (Vision-Language-Action) Model: 시각적 관측치(Observations)와 언어 지시(Language Instructions)를 입력으로 받아 로봇의 제어 동작을 생성하는 end-to-end 모델임.
- Flow Matching: 동작 생성 과정에서 잡음(Noise)으로부터 실제 동작(Ground-truth action)을 예측하기 위해 사용하는 생성 모델링 기법임.
- Interleaved Action Sequence: 다양한 데이터 소스(인간, 로봇)마다 가용 가능한 동작 정보(Translation, 6DoF End-effector pose 등)가 다를 때, 이를 유연하게 처리하기 위해 고안된 병합 동작 토큰 구조임.
2. Motivation & Problem Statement (연구 배경 및 문제 정의)
본 논문은 인간의 풍부한 동작 데이터를 로봇 학습에 활용할 때 발생하는 데이터 간 불일치 및 품질 문제를 해결하고자 한다. 기존 연구들은 인간의 손을 6DoF 로봇 embodiment로 취급하여 6DoF wrist poses를 추출했으나, 이는 예측값의 Noise가 심하고 인간 손가락과 로봇 그리퍼 간의 접촉 패턴(Contact pattern) 차이로 인해 로봇 제어에 부적합하다는 한계가 있다 [Figure 2]. 이러한 rotation-inclusive 동작 신호는 로봇 조작 학습의 비효율성을 초래하므로, 저자들은 인간과 로봇이 공유 가능한 translation-only 기반의 새로운 동작 공간 정의가 필요함을 강조한다.
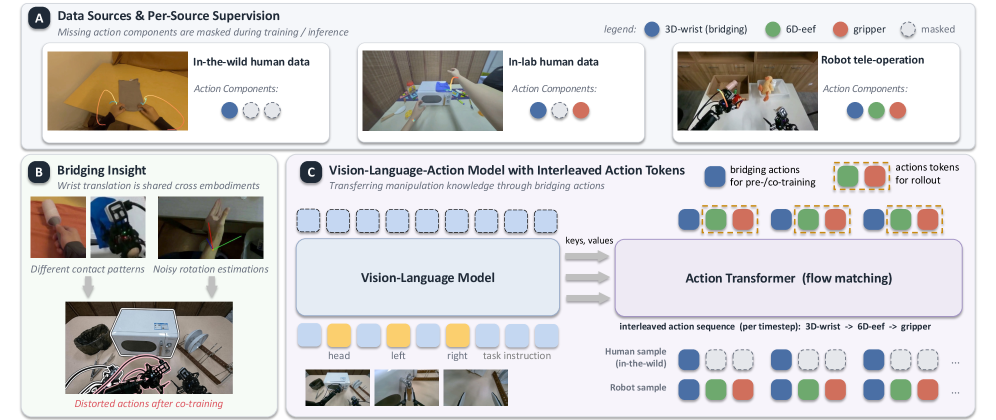
Figure 2 — 아키텍처 및 동작 표현 구조
3. Method & Key Results (제안 방법론 및 핵심 결과)
저자들은 인간의 손 동작 데이터와 로봇의 엔드 이펙터 동작을 매핑하기 위해 relative wrist translation을 bridging action으로 채택하는 프레임워크를 제안한다 [Figure 1]. 학습 단계에서는 우선 대규모 인간 데이터를 활용해 bridging action을 사전 학습한 후, 실제 로봇 데이터를 결합하여 interleaved action tokens과 attention masking을 통해 다양한 데이터 소스를 통합하는 human-robot co-training을 수행한다. 실험 결과, 본 논문의 bridging action은 단순 6DoF 기반 접근법 대비 월등한 성능을 보였으며, 복잡한 manipulation 태스크에서 성공률(Success Rate)이 크게 향상되었다 [Table 2]. 특히, 인간 데이터로 사전 학습한 모델은 few-shot 실물 로봇 환경에서 더 높은 데이터 효율성(Data Efficiency)을 보여주었으며, 전체 평균 성공률에서 베이스라인 대비 유의미한 우위를 점하였다 [Figure 5].
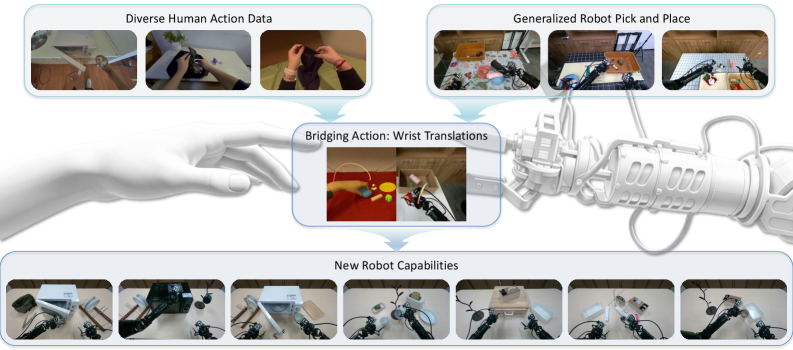
Figure 1 — 제안 모델 전체 개요
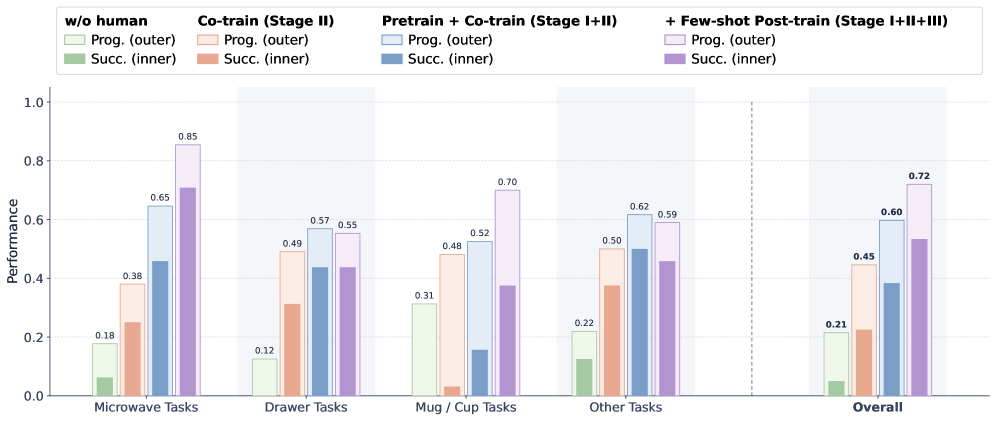
Figure 5 — 핵심 실험 결과 비교
4. Conclusion & Impact (결론 및 시사점)
본 논문은 translation 기반의 bridging action이 서로 다른 embodiment 간의 manipulation 지식 전이에 매우 효과적임을 입증하였다. 이 연구는 인간 데이터를 로봇 학습의 핵심 자원으로 스케일업(Scale-up)할 수 있는 실질적인 토대를 마련했으며, 특히 복잡한 기구 조작(Microwave, Drawer 등)에서 로봇의 일반화 능력을 크게 개선했다는 점에서 의의가 있다. 향후 본 연구의 접근 방식은 대규모 비정형 데이터로부터 범용 로봇 지능을 구축하려는 학계 및 산업계 연구에 중요한 가이드라인이 될 것으로 기대된다.
⚠️ 알림: 이 리뷰는 AI로 작성되었습니다.
관련 포스트
- [논문리뷰] VLANeXt: Recipes for Building Strong VLA Models
- [논문리뷰] iFlyBot-VLA Technical Report
- [논문리뷰] FLOWER: Democratizing Generalist Robot Policies with Efficient Vision-Language-Action Flow Policies
- [논문리뷰] ACE-Ego-0: Unifying Egocentric Human and Robotic Data for VLA Pretraining
- [논문리뷰] Robots Need More than VLA and World Models
Review 의 다른글
- 이전글 [논문리뷰] Towards Automating Scientific Review with Google's Paper Assistant Tool
- 현재글 : [논문리뷰] Translation as a Bridging Action: Transferring Manipulation Skills from Humans to Robots
- 다음글 [논문리뷰] Agentic Abstention: Do Agents Know When to Stop Instead of Act?
댓글