[논문리뷰] DexJoCo: A Benchmark and Toolkit for Task-Oriented Dexterous Manipulation on MuJoCo
링크: 논문 PDF로 바로 열기
메타데이터
저자: Hanwen Wang, Weizhi Zhao, Xiangyu Wang, Siyuan Huang, He Lin, Boyuan Zheng, Rongtao Xu, Gang Wang, Yao Mu, He Wang, Lue Fan, Hongsheng Li, Zhaoxiang Zhang, Tieniu Tan
1. Key Terms & Definitions (핵심 용어 및 정의)
- Dexterous Manipulation: 단순한 그리퍼(Parallel Gripper)를 넘어, 다관절 손(Multi-fingered Hand)을 활용하여 복잡하고 세밀한 조작을 수행하는 로봇 기술을 의미합니다.
- Teleoperation: 인간 작업자가 모션 캡처 장비(예: Rokoko glove)를 사용하여 로봇 손의 동작을 원격으로 제어하고, 고품질의 실연 데이터를 수집하는 방식을 지칭합니다.
- Embodiment Gap: 인간의 손과 로봇 손 사이의 구조적 차이로 인해 발생하는 제어 명령의 불일치를 의미하며, 이를 해결하기 위해 논문에서는 Geometric Retargeting 기법을 적용합니다.
- VLA (Vision-Language-Action) Models: 시각적 입력과 언어 명령을 바탕으로 로봇의 제어 명령을 생성하는 인공지능 프레임워크로, π0.5와 GR00T N1.5 등이 이 범주에 속합니다.
- Action Chunking: 복수의 시간 단계(Time-step)에 해당하는 동작을 하나의 단위로 묶어 생성하는 기법으로, 제어의 평활도(Smoothness)를 향상시킵니다.
2. Motivation & Problem Statement (연구 배경 및 문제 정의)
본 논문은 기존의 로봇 조작 벤치마크가 단순한 그리퍼 중심의 환경에 치중되어 있어, 진정한 의미의 인간 수준(Human-level) 조작 능력을 평가하는 데 한계가 있다는 문제 의식에서 출발합니다. 기존 연구들은 환경 설정의 비표준화, 단순한 태스크 정의, 그리고 고품질의 dexterous 데이터 수집 시스템의 부재라는 구조적 어려움을 겪고 있습니다. 특히 복잡한 도구 사용이나 양손 협업을 평가할 수 있는 통합된 벤치마크가 부족하여 최신 VLA 모델들의 성능을 체계적으로 검증하기 어렵습니다. 따라서 본 연구는 MuJoCo 환경 내에서 기능적으로 검증된 11개의 난이도 높은 태스크와 저비용 데이터 수집 툴킷을 갖춘 DexJoCo를 제안합니다 [Figure 1].
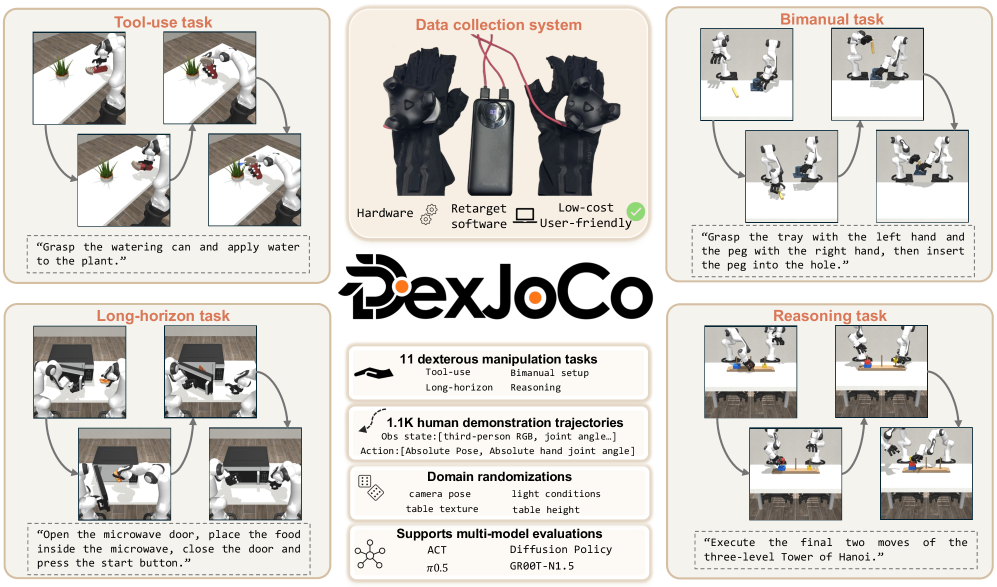
Figure 1 — DexJoCo 개요
3. Method & Key Results (제안 방법론 및 핵심 결과)
본 연구는 Rethink Robotics 베이스, Franka Panda 매니퓰레이터, Allegro Hand를 통합한 물리 기반 시뮬레이션 환경을 구축하고, Rokoko Smartgloves와 HTC Vive 트래커를 활용한 저비용 원격 제어 시스템을 구현했습니다 [Figure 2], [Figure 3]. 제안된 DexJoCo는 1.1K 규모의 인간 실연 데이터를 제공하며, 도구 사용, 양손 협업, 장기 계획(Long-horizon) 등을 포함한 11가지 태스크를 지원합니다 [Figure 4]. 실험 결과, 최신 Diffusion Policy (DP) 및 VLA 모델들은 시각적 및 동적 무작위화(Domain Randomization) 환경에서 성능 저하를 보였으며, 특히 미세 조작과 버튼 클릭과 같은 접촉 기반 작업에서 유의미한 실패율이 관찰되었습니다 [Table 2]. 정량적 분석 결과, DP-C (CNN 기반 아키텍처)가 미세 조작 태스크에서 다른 모델들보다 우수한 성공률을 기록했으며, 사전 학습된 액션 헤드를 유지하는 방식(Partial pretrain-AH)이 완전 재학습보다 전반적인 성능 향상에 효과적임을 입증했습니다 [Table 3].
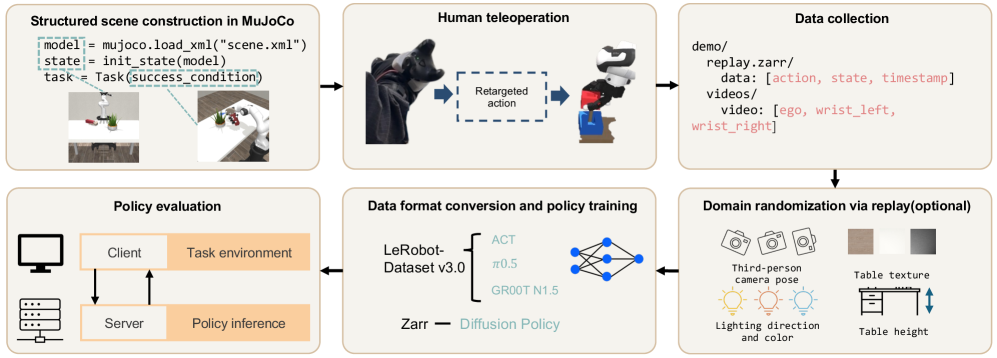
Figure 2 — DexJoCo 파이프라인
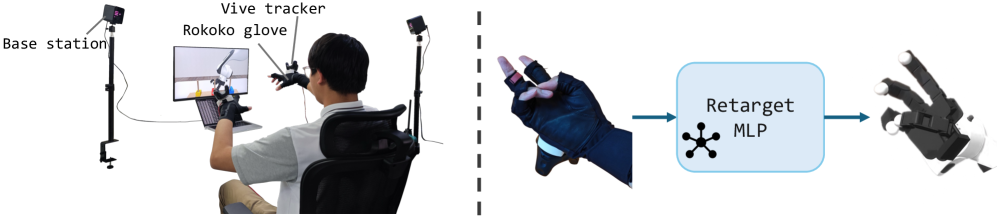
Figure 3 — 데이터 수집 시스템
4. Conclusion & Impact (결론 및 시사점)
본 논문은 dexterous manipulation을 위한 표준화된 벤치마크인 DexJoCo를 통해 기존 로봇 학습 모델들의 한계를 명확히 규명하였습니다. 연구 결과, 현재의 VLA 모델들은 그리퍼 기반 데이터에 편향되어 있어 다관절 손의 자유도를 충분히 활용하지 못하며, 특히 접촉 기반 상호작용에서 시각 정보만으로는 한계가 있음이 드러났습니다. 이 벤치마크와 툴킷은 향후 dexterous hand 중심의 파운데이션 모델 개발을 촉진하고, 정밀 조작 및 다중 모달 정책 학습을 위한 중요한 연구 발판이 될 것입니다. 또한, 제안된 데이터 수집 시스템은 로봇 학습의 진입 장벽을 낮추어 향후 로봇 조작 연구의 생산성을 높이는 데 크게 기여할 것으로 기대됩니다.
⚠️ 알림: 이 리뷰는 AI로 작성되었습니다.
관련 포스트
- [논문리뷰] SIEVE: Structure-Aware Data Selection for Imitation Learning with VLA Models
- [논문리뷰] Translation as a Bridging Action: Transferring Manipulation Skills from Humans to Robots
- [논문리뷰] RoboSemanticBench: Diagnosing Semantic Grounding in Action Prediction for VLA Models
- [논문리뷰] VLANeXt: Recipes for Building Strong VLA Models
- [논문리뷰] SOP: A Scalable Online Post-Training System for Vision-Language-Action Models
Review 의 다른글
- 이전글 [논문리뷰] CiteVQA: Benchmarking Evidence Attribution for Trustworthy Document Intelligence
- 현재글 : [논문리뷰] DexJoCo: A Benchmark and Toolkit for Task-Oriented Dexterous Manipulation on MuJoCo
- 다음글 [논문리뷰] DiagnosticIQ: A Benchmark for LLM-Based Industrial Maintenance Action Recommendation from Symbolic Rules
댓글