[논문리뷰] StressDream: Steering Video World Models for Robust Policy Evaluation and Improvement
링크: 논문 PDF로 바로 열기
메타데이터
저자: Junwon Seo, Sushant Veer, Ran Tian, Wenhao Ding, Apoorva Sharma, Karen Leung, Edward Schmerling, Marco Pavone, Andrea Bajcsy
1. Key Terms & Definitions (핵심 용어 및 정의)
- Video World Models (WMs): 로봇의 동작(action)을 조건으로 미래의 관찰(observation)을 생성하여 물리적 환경을 시뮬레이션하는 생성형 모델입니다.
- Inference-time Steering: 사전에 학습된 모델의 파라미터를 수정하지 않고, 생성 과정에서의 입력을 최적화하여 사용자가 원하는 특정 이벤트나 결과를 유도하는 기술입니다.
- Typical Set: 고차원 확률 분포에서 확률 질량이 집중되는 영역으로, 모델이 학습한 분포를 벗어나지 않고 plausibility를 유지하는 공간을 의미합니다.
- Score-Distillation: 전체 역확산(denoising) 과정을 미분하는 대신, 생성된 샘플의 기울기를 이용해 초기 노이즈를 효율적으로 최적화하는 근사 기법입니다.
2. Motivation & Problem Statement (연구 배경 및 문제 정의)
본 연구는 기존 Video World Models가 nominal한 미래 예측에만 의존하여, 로봇 정책의 실패 가능성이나 위험한 이벤트를 과소평가(under-explore)하는 문제를 해결하고자 합니다.
기존의 나이브한 샘플링 방식은 희소한(rare) 사건이나 high-impact 결과를 찾기 위해 과도한 샘플을 생성해야 하며, 고차원 노이즈 공간에서 최적화를 시도할 경우 모델이 학습하지 않은 OOD(Out-of-Distribution) 영역으로 빠져 implausible한 비디오를 생성하는 위험이 있습니다. [Figure 1]에 묘사된 것처럼, 모델의 예측을 현실적이고 구체적인 위험 이벤트로 효율적으로 유도하면서도, 생성된 영상의 일관성과 plausibility를 보장하는 steering 기법이 필수적입니다.
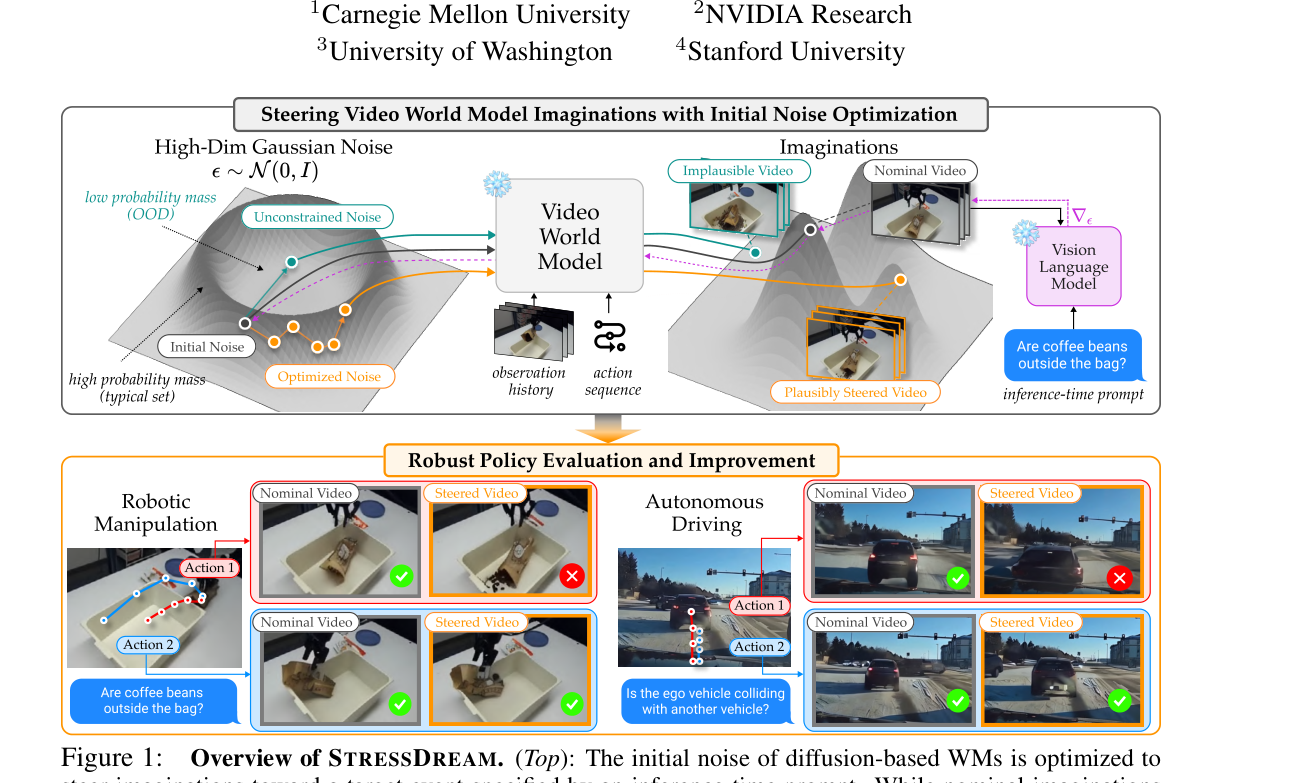
Figure 1 — 제안된 프레임워크의 개념적 구조와 노이즈 최적화 과정을 보여주는 핵심 다이어그램입니다.
3. Method & Key Results (제안 방법론 및 핵심 결과)
본 연구는 STRESSDREAM을 통해 VLM 기반의 semantic objective와 Typical Set 보존을 위한 plausibility objective를 결합하여 초기 노이즈를 최적화하는 새로운 steering 프레임워크를 제안합니다.
Semantic objective는 Qwen-VL을 활용하여 생성된 비디오가 타겟 이벤트(예: 충돌, spilling)를 얼마나 정확하게 묘사하는지 미분 가능한 점수로 변환하며, plausibility objective는 norm, isotropy, spectral whiteness 제약을 통해 노이즈가 고차원 가우시안 분포의 Typical Set 내에 머물도록 강제합니다. 또한, Score-Distillation 기법을 사용하여 전체 50단계의 denoising 과정을 역전파할 필요 없이 효율적인 gradient 업데이트를 수행합니다.
실험 결과, STRESSDREAM은 자율 주행 및 로봇 조작 태스크에서 실패 이벤트를 감지하는 Recall을 54%에서 94%까지 대폭 향상시켰습니다. 또한, 이러한 robust한 평가를 통해 VLA policy의 성공률을 39%에서 71%로 크게 개선했습니다. [Figure 5]와 [Figure 8]은 각각 실패 감지 성능과 정책 개선의 효율성을 입증합니다.
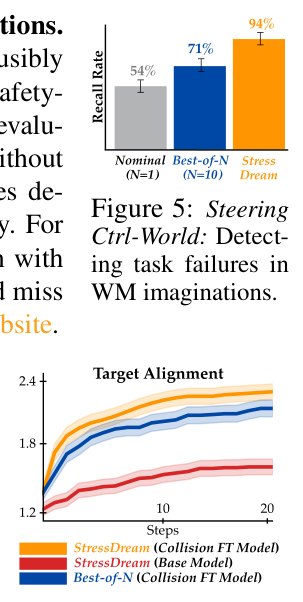
Figure 5 — STRESSDREAM이 실패 탐지 Recall 성능을 얼마나 크게 개선했는지 보여주는 비교 그래프입니다.
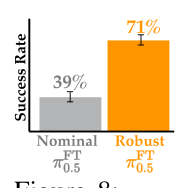
Figure 8 — 실패 상황을 고려한 정책 개선이 실제 성공률에 미치는 영향을 입증하는 결과입니다.
4. Conclusion & Impact (결론 및 시사점)
본 연구는 STRESSDREAM을 통해 고차원 비디오 월드 모델을 안전성과 강건성 검증에 최적화된 도구로 탈바꿈시켰습니다. 제안된 기법은 모델을 재학습하는 비용 없이 inference-time 최적화만으로 위험 상황을 정밀하게 타겟팅할 수 있음을 보여주며, 이는 자율 주행 및 로봇 조작 등 안전이 중요한 분야에서 정책 검증 및 개선 과정을 비약적으로 발전시킬 것으로 기대됩니다. 또한 Typical Set 제약을 통한 생성 품질 보존 전략은 여타 고차원 생성 모델의 controllability를 확보하는 데 중요한 학술적 기반을 제공합니다.
⚠️ 알림: 이 리뷰는 AI로 작성되었습니다.
관련 포스트
- [논문리뷰] Latent Spatial Memory for Video World Models
- [논문리뷰] minWM: A Full-Stack Open-Source Framework for Real-Time Interactive Video World Models
- [논문리뷰] Stitched Value Model for Diffusion Alignment
- [논문리뷰] MinerU-Diffusion: Rethinking Document OCR as Inverse Rendering via Diffusion Decoding
- [논문리뷰] Beyond Language Modeling: An Exploration of Multimodal Pretraining
Review 의 다른글
- 이전글 [논문리뷰] StreamChar: Long-Horizon Streaming Character Audio-Video Generation with Decoupled Orchestration
- 현재글 : [논문리뷰] StressDream: Steering Video World Models for Robust Policy Evaluation and Improvement
- 다음글 [논문리뷰] Unified Neural Scaling Laws
댓글