[논문리뷰] PhysisForcing: Physics Reinforced World Simulator for Robotic Manipulation
링크: 논문 PDF로 바로 열기
메타데이터
저자: Peiwen Zhang, Yufan Deng, Shangkun Sun, et al.
1. Key Terms & Definitions (핵심 용어 및 정의)
- PhysisForcing: 로봇 조작(Robotic Manipulation) 영상 생성 시 물리적 일관성을 강화하기 위해 제안된 지역 중심(Region-focused) 계층적 물리 정렬 프레임워크입니다.
- Pixel-level Physics Alignment: 로봇과 물체 간의 접촉 지점 및 움직임을 보존하기 위해 CoTracker3 등을 활용하여 개별 포인트 궤적의 연속성을 강제하는 손실 함수입니다.
- Semantic-level Physics Alignment: 비디오 이해 인코더(Video Understanding Encoder)의 토큰 간 유사도 행렬을 DiT 특징 맵과 일치시켜 로봇과 물체 간의 관계적 일관성을 확보하는 기법입니다.
- Physics-informative Regions: 로봇, 조작 대상 물체, 접촉면 등 물리적 상호작용이 발생하는 핵심 영역을 의미하며, 해당 영역을 식별하여 물리 감독(Physical supervision)을 집중합니다.
- WorldArena: 로봇 조작 과업에서 생성된 비디오 모델이 얼마나 물리적으로 타당한 예측을 하는지 평가하는 에이전트 플래너 프로토콜(Action-planner protocol)입니다.
2. Motivation & Problem Statement (연구 배경 및 문제 정의)
본 논문은 최신 비디오 생성 모델들이 로봇 조작 과업에서 나타내는 물리적 불일치(Physical implausibility) 문제를 해결하고자 합니다. 기존의 범용 비디오 모델이나 로봇 특화 모델은 정교한 시각적 품질은 확보하지만, 로봇-물체 간 상호작용 시 발생하는 궤적 단절, 물체 투과, 반중력 현상 등 물리 법칙 위반을 효과적으로 제어하지 못합니다. 이러한 결함은 생성된 영상을 월드 시뮬레이터(World Simulator)로 활용할 때 하위 정책 학습(Downstream Policy Learning)의 신뢰성을 떨어뜨리는 핵심 요인입니다. 저자들은 기존 연구가 물리적 정보를 전역적으로 균일하게 다루거나, 단순 기하학적 제약에만 의존하여 상호작용의 의미론적 관계를 충분히 반영하지 못한다는 점을 지적합니다.
3. Method & Key Results (제안 방법론 및 핵심 결과)
본 논문은 물리적 신호가 풍부한 영역을 식별하고, 이에 대해 픽셀 수준과 의미론적 수준의 계층적 정렬을 수행하는 PhysisForcing을 제안합니다 [Figure 2]. 첫째, Physics-informative Region Extraction을 통해 깊이 정보와 궤적 이동량을 기반으로 조작 핵심 영역의 마스크를 생성합니다. 둘째, 픽셀 수준에서 Pixel-level Trajectory Alignment Loss를 적용하여 CoTracker3가 추출한 궤적과 모델 예측 간의 불일치를 최소화합니다. 셋째, Semantic-level Relational Alignment Loss를 통해 학습된 인코더의 관계 구조를 모델의 특징 맵에 이식하여 로봇-물체 간 상호작용의 타당성을 보장합니다.
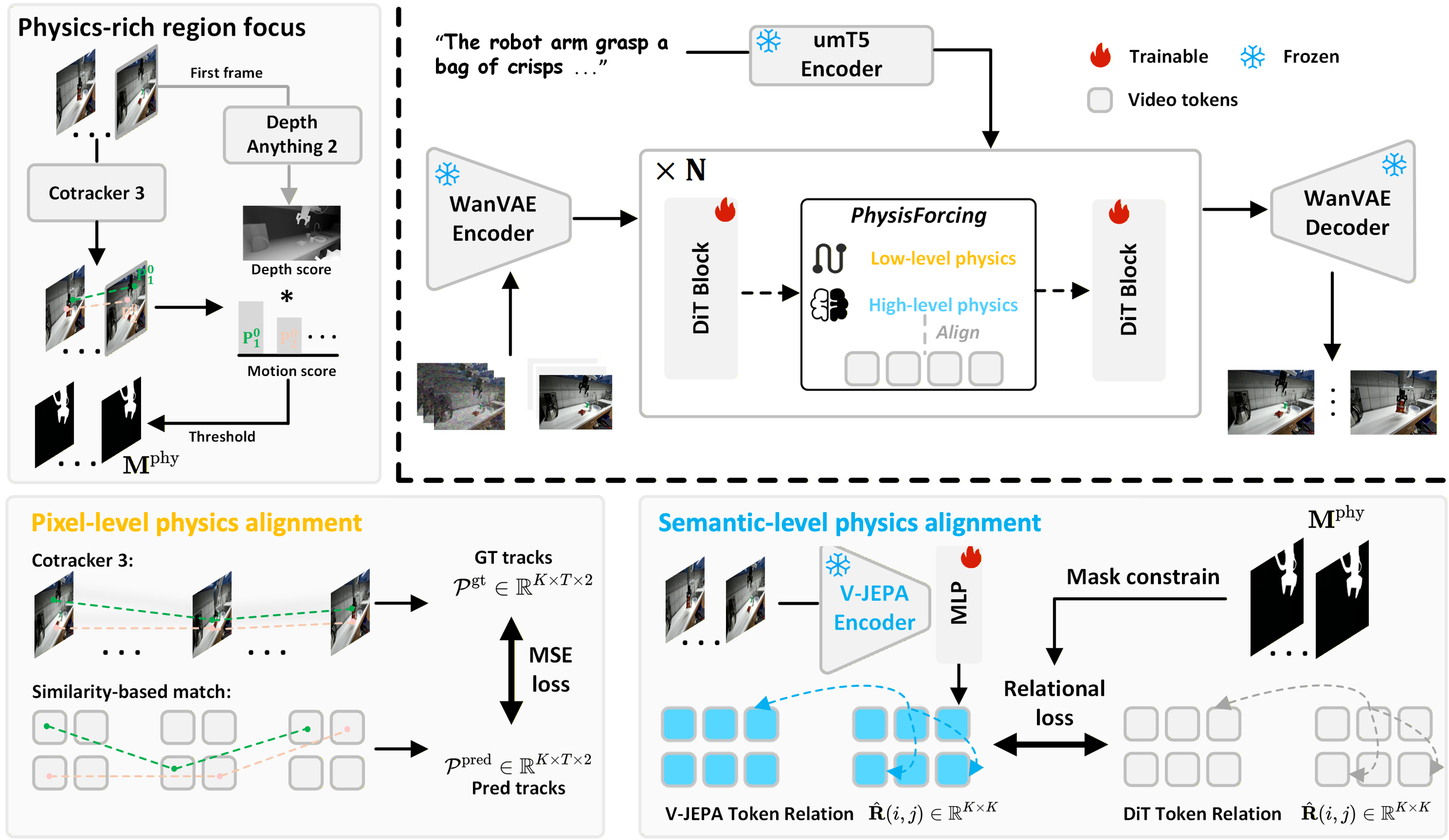
Figure 2 — 전체 아키텍처 및 정렬 방식
실험 결과, PhysisForcing은 Wan2.2-I2V-A14B 및 Cosmos3-Nano와 같은 다양한 백본에서 성능을 크게 향상시켰습니다. R-Bench 평가에서 PF-Cosmos는 기준 모델 대비 9.2%, PF-Wan은 22.3%의 물리적 타당성 점수 향상을 달성하며 SOTA를 기록하였습니다 [Table 1]. 또한, WorldArena 환경에서 Closed-loop 성공률을 기존 16.0%에서 24.0%로 향상시켰으며, 실제 로봇 조작 과업에서도 정책 학습 성공률을 68.2%에서 72.8%로 개선하며 물리적으로 일치된 생성 모델의 표현력이 하위 정책 학습에 강력한 기여를 함을 입증하였습니다 [Table 2, Table 3].
4. Conclusion & Impact (결론 및 시사점)
본 연구는 비디오 생성 모델이 단순한 영상 합성을 넘어 신뢰할 수 있는 로봇 월드 시뮬레이터로 기능하기 위해 '지역 중심의 계층적 물리 정렬'이 필수적임을 입증했습니다. 제안된 프레임워크는 기존 생성 모델의 추론 비용을 늘리지 않으면서도 물리적 일관성을 확보할 수 있는 효율적인 학습 전략을 제시합니다. 이러한 결과는 향후 embodied AI 연구에서 데이터 부족 문제를 해결하기 위한 고품질, 물리적 타당성이 보장된 합성 데이터 생성 및 정책 학습 분야에 중요한 시사점을 제공합니다.
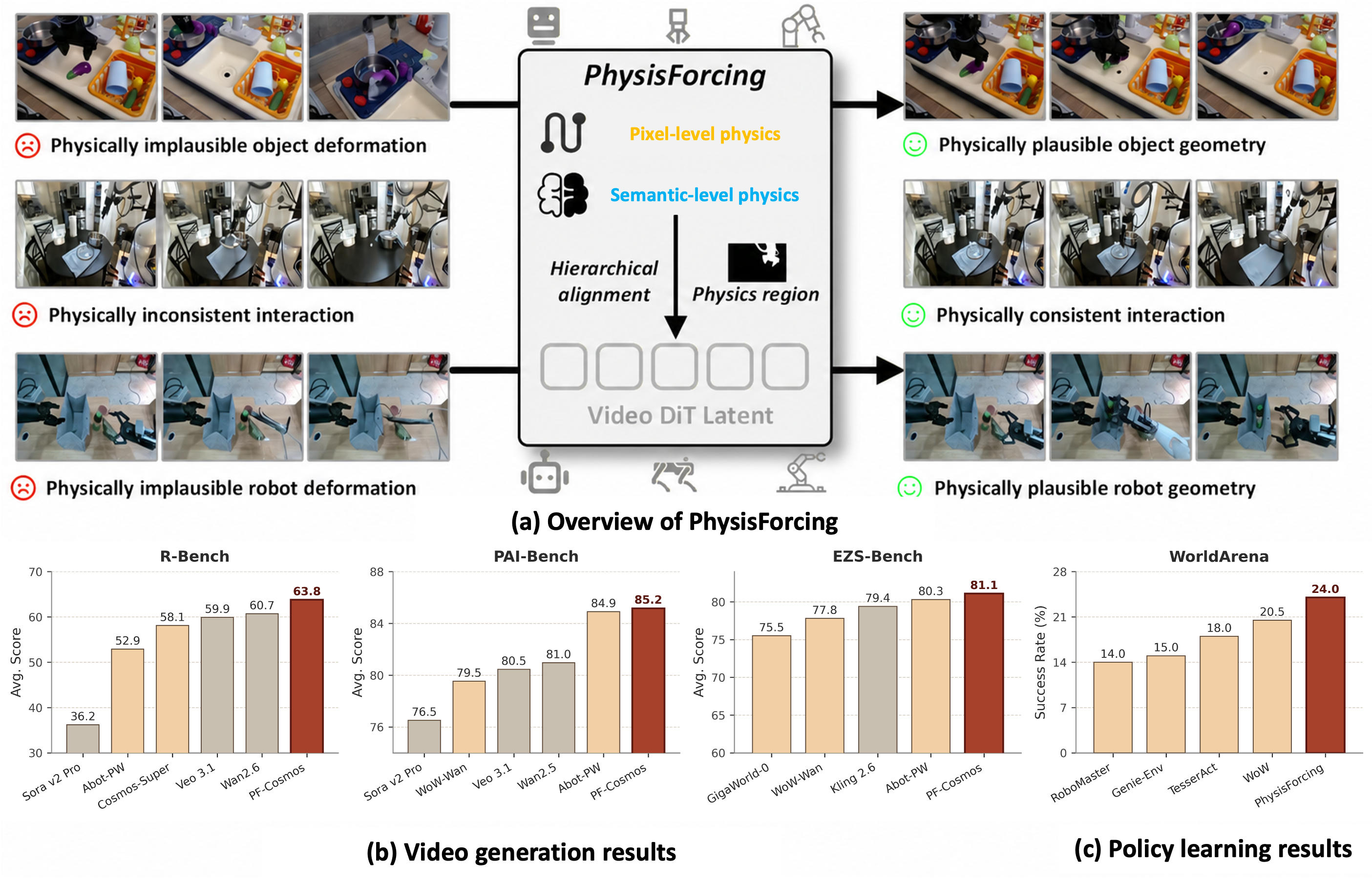
Figure 1 — PhysisForcing 개요
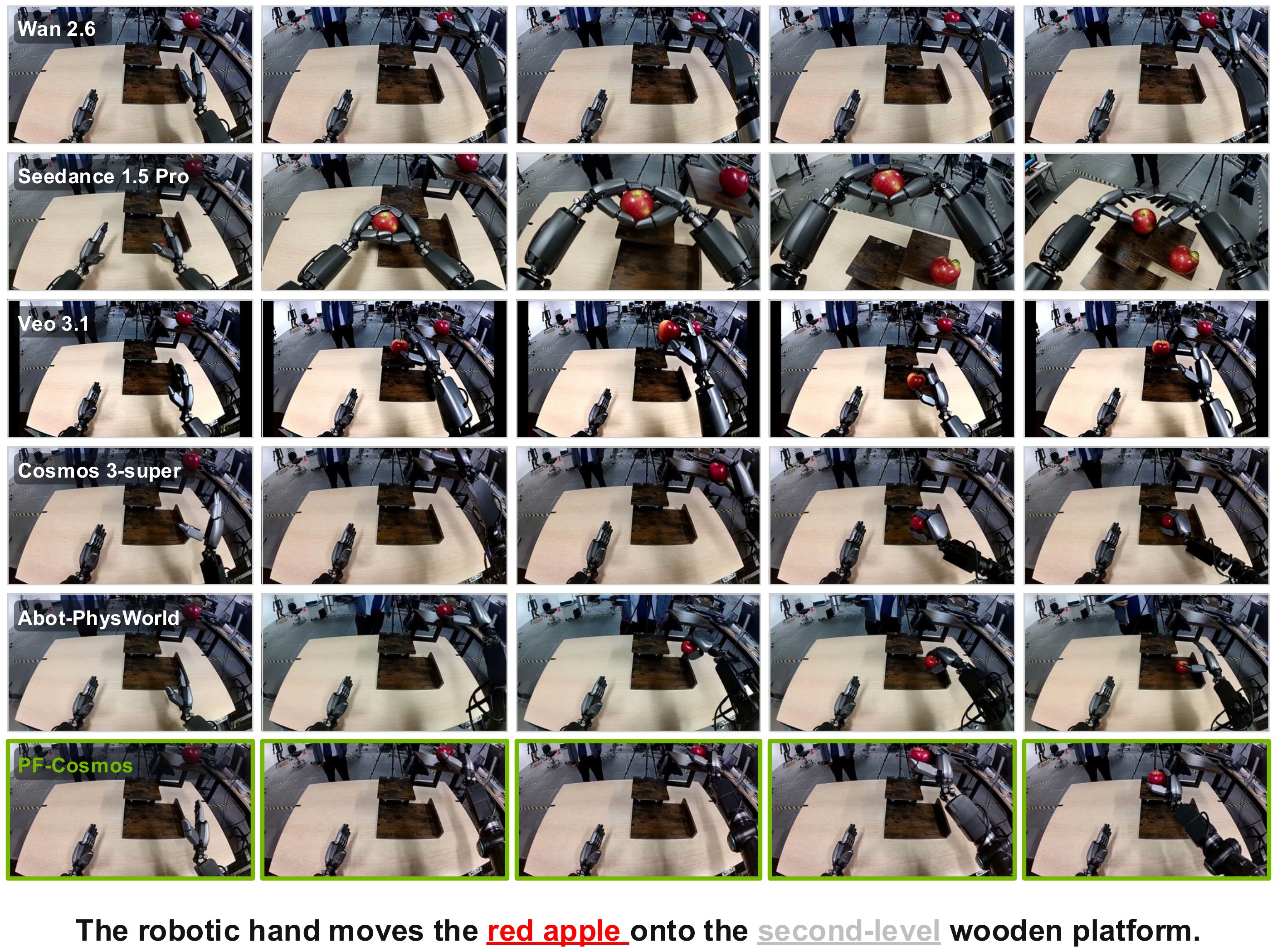
Figure 5 — 물리적 일관성 정성 비교
⚠️ 알림: 이 리뷰는 AI로 작성되었습니다.
관련 포스트
- [논문리뷰] MIND-V: Hierarchical Video Generation for Long-Horizon Robotic Manipulation with RL-based Physical Alignment
- [논문리뷰] World Value Models for Robotic Manipulation
- [논문리뷰] Current World Models Lack a Persistent State Core
- [논문리뷰] EgoCS-400K: An Egocentric Gameplay Dataset for World Models
- [논문리뷰] Qwen-RobotWorld Technical Report: Unifying Embodied World Modeling through Language-Conditioned Video Generation
Review 의 다른글
- 이전글 [논문리뷰] Parallel Rollout Approximation for Pixel-Space Autoregressive Image Generation
- 현재글 : [논문리뷰] PhysisForcing: Physics Reinforced World Simulator for Robotic Manipulation
- 다음글 [논문리뷰] ProMSA:Progressive Multimodal Search Agents for Knowledge-Based Visual Question Answering
댓글