[논문리뷰] Learning A Unified Risk Map for Autonomous Driving in Partially Observable Environments
링크: 논문 PDF로 바로 열기
메타데이터
저자: Jie Jia, Yaofeng Su, Zeyu Bao, Yun Hong, Bingzhao Gao, Zhongxue Gan, Wenchao Ding, et al.
1. Key Terms & Definitions (핵심 용어 및 정의)
- Unified Risk Map: 가시 영역 너머의 잠재적 위험을 평가하기 위해 traffic flow risk와 collision risk를 통합한 spatiotemporal 표현체입니다.
- Occlusion-aware Prediction: 보이지 않는 blind zone(occluded regions) 내의 잠재적 agent 존재와 그 궤적을 추론하여 시스템의 인지 불확실성을 해결하는 기술입니다.
- Diffusion-based Scenario Generation: 실제 데이터의 분포를 따르면서도, 시스템의 강건성을 테스트할 수 있는 adversarial한 occlusion interaction 시나리오를 생성하는 프레임워크입니다.
- Time-to-Collision (TTC): ego vehicle와 타 객체 간의 충돌까지 남은 시간을 의미하며, 본 논문에서는 안전성 평가를 위한 핵심 정량적 지표(
TTC_min,TTC_avg)로 사용됩니다.
2. Motivation & Problem Statement (연구 배경 및 문제 정의)
본 논문은 자율주행 환경에서 시야가 차단된(partially observable) 환경에서의 인지 불확실성과 이로 인한 주행 전략 수립의 한계를 해결하고자 합니다. 기존의 reachability 기반 접근법은 지나치게 보수적인(overly conservative) 계획을 수립하는 경향이 있으며, 데이터 기반 모델은 고도의 불확실성 환경에서 occluded agent의 궤적을 정확히 예측하지 못하는 문제를 겪습니다. 특히 안전에 직면한 치명적인 occluded interaction 데이터가 현저히 부족하여 모델 학습의 병목이 발생합니다. 이를 위해 저자들은 traffic flow와 collision 위험을 체계적으로 모델링하고, adversarial한 시나리오를 생성하여 학습에 활용하는 통합 프레임워크를 제안합니다 [Figure 1].
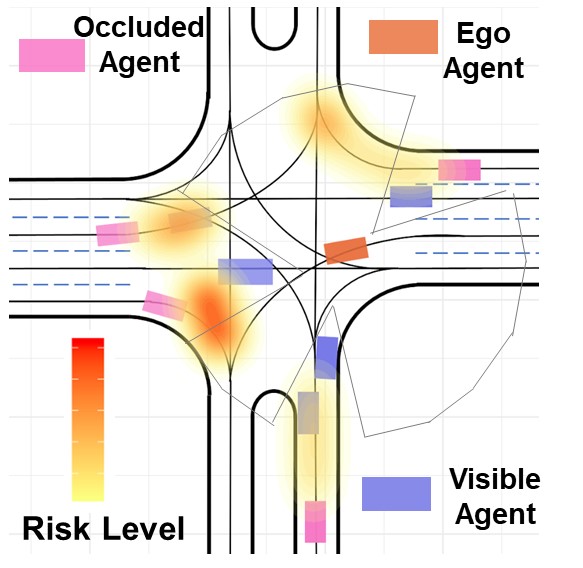
Figure 1 — 통합 spatiotemporal 위험장 구조
3. Method & Key Results (제안 방법론 및 핵심 결과)
본 논문은 통합적인 spatiotemporal risk field를 구축하고, diffusion 기반 데이터 생성기를 통해 학습 효율성을 극대화하는 프레임워크를 제안합니다 [Figure 2]. 핵심 방법론은 교통 흐름 밀도와 collision hotspots을 결합하여 grid-level의 risk field를 산출하며, 훈련된 diffusion 모델에 guidance function을 적용하여 실질적이고 adversarial한 corner case를 대량 합성합니다. 제안된 prediction network는 lane-anchored 쿼리를 통해 효율적인 실시간 risk 추론을 수행합니다. 실험 결과, Waymo Open Motion Dataset(WOMD) 환경에서 본 모델은 SOTA baseline 대비 Minimum Time-to-Collision(TTC_min) 수치를 0.78배, Average Time-to-Collision(TTC_avg) 수치를 1.67배 개선하는 성과를 거두었습니다 [Table I]. 또한, 제안 방법론은 기존 rule-based 방법 대비 시나리오 생성의 현실성(OnRoad Rate)을 13.6% 향상시키면서도, 더 공격적인 adversarial 품질(TTC 41.2% 감소)을 입증하였습니다 [Table II].
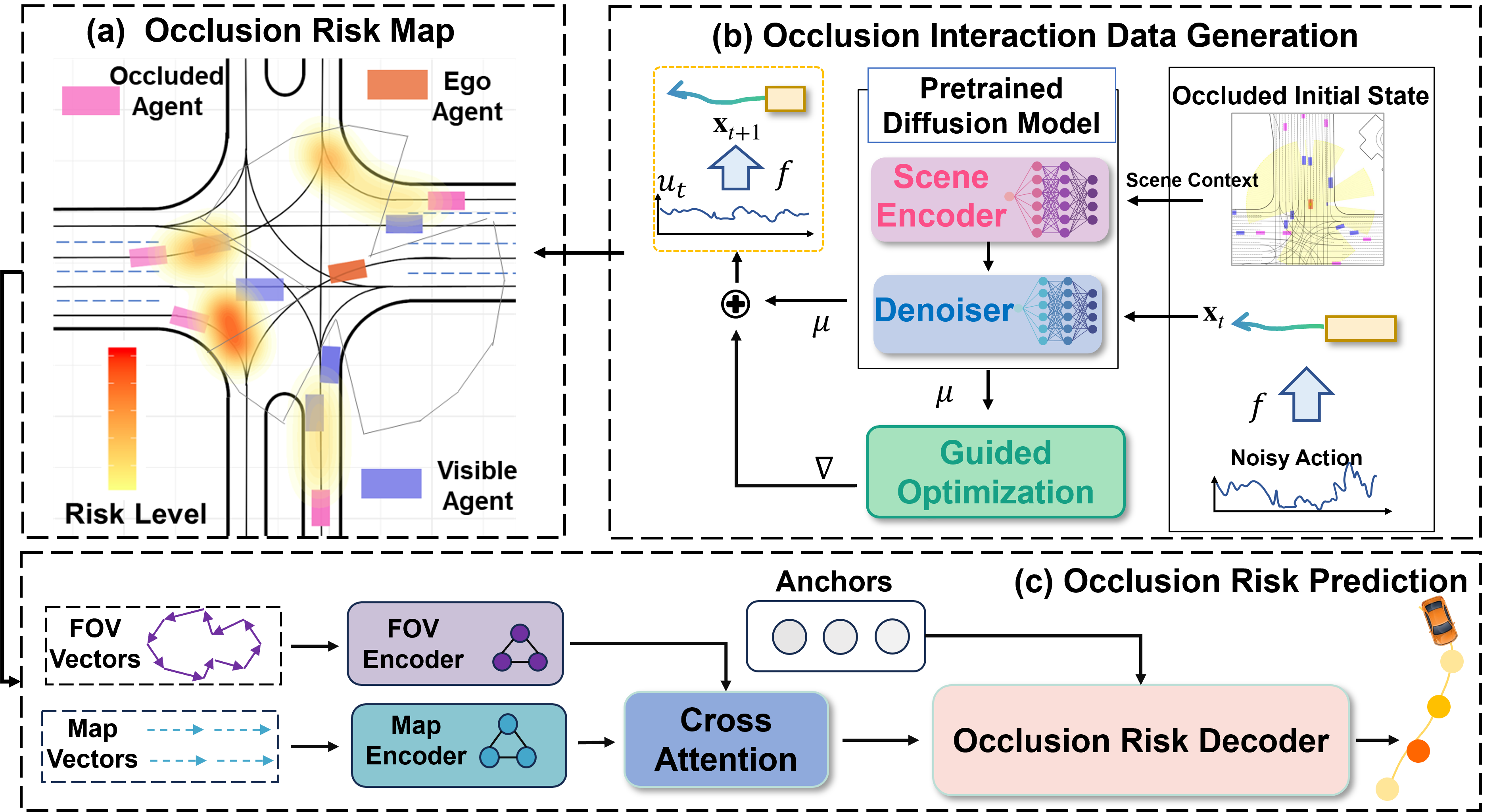
Figure 2 — 제안 모델의 전체 아키텍처
4. Conclusion & Impact (결론 및 시사점)
본 연구는 occluded 환경에서의 위험을 체계적으로 정량화하고, 이를 planning 단계에 자연스럽게 통합하는 Unified Risk Map 프레임워크를 통해 자율주행의 안전성을 획기적으로 향상시켰습니다. Diffusion 모델을 활용한 효율적인 adversarial 데이터 생성은 데이터 부족 문제를 해결하는 새로운 패러다임을 제시합니다. 본 기술은 향후 자율주행 시스템이 가시성 제약 상황에서 인간 운전자처럼 더 능동적이고 안전한 주행 전략을 수립하는 데 핵심적인 기여를 할 것으로 기대됩니다.
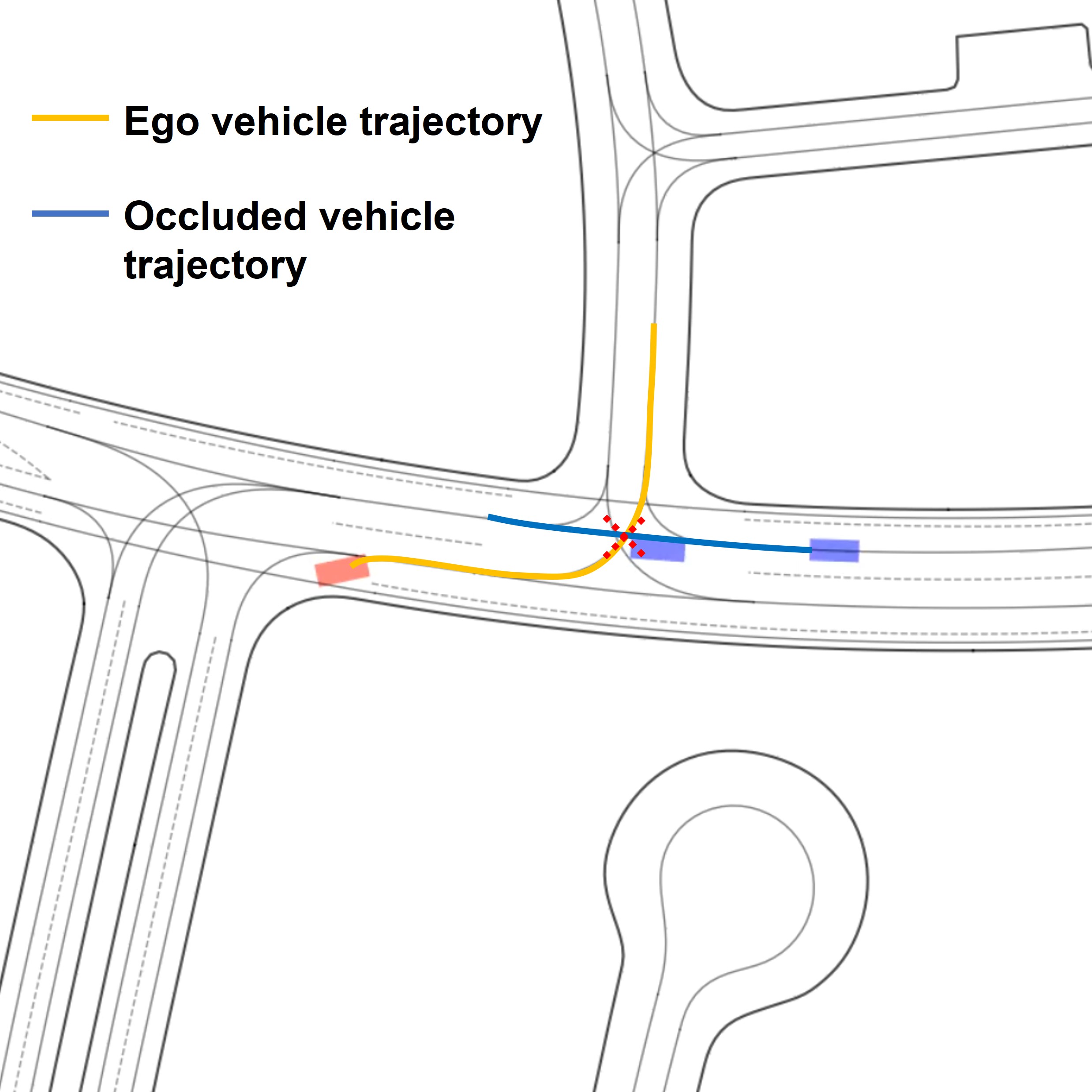
Figure 3 — 계획 성능 정성적 분석
⚠️ 알림: 이 리뷰는 AI로 작성되었습니다.
관련 포스트
- [논문리뷰] Fast-dDrive: Efficient Block-Diffusion VLM for Autonomous Driving
- [논문리뷰] Sensor2Sensor: Cross-Embodiment Sensor Conversion for Autonomous Driving
- [논문리뷰] The DAWN of World-Action Interactive Models
- [논문리뷰] UniUGP: Unifying Understanding, Generation, and Planing For End-to-end Autonomous Driving
- [논문리뷰] OpenREAD: Reinforced Open-Ended Reasoing for End-to-End Autonomous Driving with LLM-as-Critic
Review 의 다른글
- 이전글 [논문리뷰] LaRA: Layer-wise Representation Analysis for Detecting Data Contamination in RL Post-Training
- 현재글 : [논문리뷰] Learning A Unified Risk Map for Autonomous Driving in Partially Observable Environments
- 다음글 [논문리뷰] LiteCoder-Terminal: Scaling Long-Horizon Terminal Environments for Learning Language Agents
댓글